
3.The retardation of a flat faced follower when it has contact at the apex of the nose of a circular arc cam, is given by (where OQ = Distance between the centre of circular flank and centre of nose)
ω² × OQ
ω² × OQ sinθ
ω² × OQ cosθ
ω² × OQ tanθ
Correct Answer :
A. ω² × OQ
Related Questions
When the sleeve of a Porter governor moves upwards, the governor speed
Increases
Decreases
Remain unaffected
First increases and then decreases
The example of successfully constrained motion is a
Motion of an I.C. engine valve
Motion of the shaft between a footstep bearing
Piston reciprocating inside an engine cylinder
All of the above
The example of spherical pair is
Bolt and nut
Lead screw of a lathe
Ball and socket joint
Ball bearing and roller bearing
Sensitiveness of the governor is defined as the ratio of the
Mean speed to the maximum equilibrium speed
Mean speed to the minimum equilibrium speed
Difference of the maximum and minimum equilibrium speeds to the mean speed
Sum of the maximum and minimum equilibrium speeds to the mean speed
Scotch yoke mechanism is used to generate
Sine functions
Square roots
Logarithms
Inversions
ABCD is a four bar mechanism in which AB = 310 mm and CD = 450 mm. AB and CD are both perpendicular to the fixed link AD, as shown in the below figure. If the velocity of B at this condition is v. Then the velocity of C is 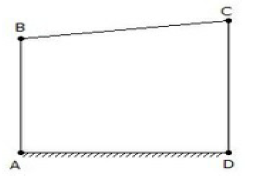
v
(2/3). v
(3/2). v
(9/4). v
In a steam engine, the distance by which the outer edge of the Dslide valve overlaps the steam port is called
Lead
Steam lap
Exhaust lap
None of these
The example of rolling pair is
Bolt and nut
Lead screw of a lathe
Ball and socket joint
Ball bearing and roller bearing
In which of the following type of gear train the first gear and the last gear are co-axial.
Simple gear train
Compound gear train
Reverted gear train
None of the above
A rotary internal combustion engine has __________ cylinders.
Four
Five
Six
Seven
An involute pinion and gear are in mesh. If both have the same size of addendum, then there will be an interference between the
Tip of the gear tooth and flank of pinion
Tip of the pinion and flank of gear
Flanks of both gear and pinion
Tip of both gear and pinion
The radius of a friction circle for a shaft rotating inside a bearing is (where r = Radius of shaft, and tan φ = Coefficient of friction between the shaft and bearing)
r sinφ
r cosφ
r tanφ
(r/2) cosφ
In a steam engine, the link constitutes a
Piston, piston rod and crosshead
Connecting rod with big and small end brasses, caps and bolts
Crank pin, crankshaft and flywheel
All of the above
The displacement of the D-slide valve is __________ the steam lap by a distance known as lead of the valve.
Greater than
Less than
Equal to
None of these
Longitudinal vibrations are said to occur when the particles of a body moves
Perpendicular to its axis
Parallel to its axis
In a circle about its axis
None of these
Balancing of rotating and reciprocating parts of an engine is necessary when it runs at
Slow speed
Moderate speed
Highs peed
Any one of these
The maximum or minimum value of the swaying couple is
± c.m.ω².r
± a (1 - c) m.ω².r
± (a/√2) (1 - c) m.ω².r
± 2a (1 - c) m.ω².r
For simple harmonic motion of the of follower, a cosine curve represents
Displacement diagram
Velocity diagram
Acceleration diagram
All of the above
Kinematic pairs are those which have two elements that
Have line contact
Have surface contact
Permit relative motion
Are held together
Angular acceleration of a link can be determined by dividing the
Centripetal component of acceleration with length of link
Tangential component of acceleration with length of link
Resultant acceleration with length of link
All of the above
The D-slide valve is also known as
Inside admission valve
Outside admission valve
Piston slide valve
None of these
A cam with a roller follower would constitute following type of pair
Lower pair
Higher pair
Open pair
Close pair
A single degree of freedom system is given by, m × (d²x/dt²) + c × (dx/dt) + sx = F.cosω.t with usual notations. It represents
Free vibration with damping
Free vibration without damping
Forced vibration with damping
Forced vibration without damping
The coriolis component of acceleration exists whenever a point moves along a path that has
Linear displacement
Rotational motion
Gravitational acceleration
Tangential acceleration
In steady state forced vibrations, the amplitude of vibrations at resonance is __________ damping coefficient.
Equal to
Directly proportional to
Inversely proportional to
Independent of
The tractive force is maximum or minimum when the angle of inclination of crank with the line of stroke (θ) is equal to
0° and 90°
90° and 180°
135° and 315°
270° and 360°
Relationship between the number of links (L) and number of pairs (P) is
P = 2L - 4
P = 2L + 4
P = 2L + 2
P = 2L - 2
A Hartnell governor is a
Dead weight governor
Pendulum type governor
Spring loaded governor
Inertia governor
A completely constrained motion can be transmitted with.
1 link with pin joints
2 links with pin joints
3 links with pin joints
4 links with pin joints
Pulley in a belt drive acts as
Cylindrical pair
Turning pair
Rolling pair
Sliding pair