
A combination of kinematic pairs, joined in such a way that the relative motion between the links is completely constrained, is called a
Structure
Mechanism
Kinematic chain
Inversion
Correct Answer :
C. Kinematic chain
Related Questions
The rotating shafts tend to vibrate violently at whirling speeds because
The system is unbalanced
Bearing centre line coincides with the axis
The shafts are rotating at very high speeds
Resonance is caused due to the heavy mass of the rotor
The equation of free vibrations of a system is (d²x/dt²) +36 π²x, its natural frequency is
3 Hz
3π Hz
6 Hz
6π Hz
The minimum force required to slide a body of weight W on a rough horizontal plane is
W sinθ
W cosθ
W tanθ
W cosecθ
The example of successfully constrained motion is a
Motion of an I.C. engine valve
Motion of the shaft between a footstep bearing
Piston reciprocating inside an engine cylinder
All of the above
The frictional torque transmitted in a conical pivot bearing, considering uniform pressure, is (where R = Radius of shaft, and α = Semi-angle of the cone)
(1/2) μ W R cosecα
(2/3) μ W R cosecα
(3/4) μ W R cosecα
μ W R cosecα
A simple spring-mass vibrating system has a natural frequency of fn. If the spring stiffness is halved and the mass is doubled, then the natural frequency will become
fn/2
2 fn
4 fn
8 fn
In railway axle boxes, the bearing used is
Deep groove ball bearing
Double row self aligning ball bearing
Double row spherical roller bearing
Cylindrical roller bearing
The centrifugal tension in belts
Increases power transmitted
Decreases power transmitted
Have no effect on power transmitted
Increases power transmitted upto a certain speed and then decreases
An imaginary circle which by pure rolling action, gives the same motion as the actual gear, is called
Addendum circle
Dedendum circle
Pitch circle
Clearance circle
The relation l = (2/3).(j + 2) apply only to kinematic chains in which lower pairs are used. This may be used to kinematic chains in which higher pairs are used, but each higher pair may be taken as equivalent to
One lower pair and two additional links
Two lower pairs and one additional link
Two lower pairs and two additional links
Any one of these
Creep in belt drive is due to
Material of the pulley
Material of the belt
Larger size of the driver pulley
Uneven extensions and contractions due to varying tension
Critical damping is a function of
Mass and stiffness
Mass and damping coefficient
Mass and natural frequency
Damping coefficient and natural frequency
If there are L number of links in a mechanism, then number of possible inversions is equal to
L + 1
L - 1
L
L + 2
When the pitching of a ship is __________ the effect of gyroscopic couple acting on it will be to move the ship towards port side.
Upward
Downward
Forward
Backward
A slider crank chain consists of following numbers of turning and sliding pairs
1, 3
2, 2
3, 1
4, 0
Which of the following is a lower pair?
Ball and socket i
Piston and cylinder
Cam and follower
Both (A) and (B) above
The partial balancing means
Balancing partially revolving masses
Balancing partially reciprocating masses
Best balancing of engines
All of these
In the two rotor system as shown in the below figure (I₁ < I₂), a node of vibration is situated 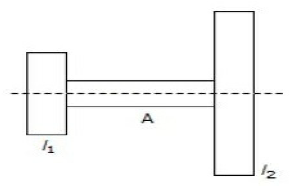
Between I₁, and I₂ but nearer I₁
Between I₁, and I₂ but nearer to I₂
Exactly in the middle of the shaft
Nearer to I₁ but outside
When a shaking force is transmitted through the springs, damping becomes detrimental when the ratio of its frequency to the natural frequency is greater than
0.25
0.5
1
2
When a mass of a critically damped single degree of freedom system is deflected from its equilibrium position and released, then it will
Return to equilibrium position without oscillation
Oscillate with increasing time period
Oscillate with decreasing amplitude
Oscillate with constant amplitude
Which of the following statement is correct for gears?
The addendum is less than the dedendum
The pitch circle diameter is the product of module and number of teeth
The contact ratio means the number of pairs of teeth in contact
All of the above
The relation between the controlling force (Fc) and radius of rotation (r) for a stable spring controlled governor is
Fc = ar + b
Fc = ar - b
Fc = ar
Fc = a/r + b
If the number of links in a mechanism is equal to l, then the numbers of possible inversions are equal to
l - 2
l - 1
l
l + 1
The maximum fluctuation of energy is the
Difference between the maximum and minimum energies
Sum of the maximum and minimum energies
Variations of energy above and below the mean resisting torque line
Ratio of the mean resisting torque to the workdone per cycle
The brake commonly used in railway trains is
Shoe brake
Band brake
Band and block brake
Internal expanding brake
The frictional torque transmitted in a flat pivot bearing, considering uniform pressure, is (where μ = Coefficient of friction, W = Load over the bearing, and R = Radius of bearing surface)
(1/2) μ W R
(2/3) μ W R
(3/4) μ W R
μ W R
The condition for correct steering of a Davis steering gear is (where α = Angle of inclination of the links to the vertical)
sinα = b/c
cosα = c/b
tanα = c/2b
cotα = c/2b
In a Hartnell governor, the compression of the spring is __________ the lift of the sleeve.
Equal to
Less than
Greater than
None of these
A circle passing through the pitch point with its center at the center of cam axis is known as
Pitch circle
Base circle
Prime circle
Outer circle
The equivalent length of a simple pendulum which gives the same frequency as a compound pendulum is
h/(kG² + h²)
(kG² + h²)/h
h²/(kG² + h²)
(kG² + h²)/h²