
A fixed gear having 200 teeth is in mesh with another gear having 50 teeth. The two gears are connected by an arm. The number of turns made by the smaller gear for one revolution of arm about the centre of bigger gear is
2
4
3
None of the above
Correct Answer :
B. 4
Related Questions
The velocity of a particle moving with simple harmonic motion, at any instant is given by (where ω = Displacement of the particle from mean position)
ω √(x² - r²)
ω √(r² - x²)
ω² √(x² - r²)
ω² √(r² - x²)
The frictional torque transmitted in a truncated conical pivot bearing, considering uniform pressure, is
(1/2). μ W cosecα (r₁ + r₂)
(2/3). μ W cosecα (r₁ + r₂)
(1/2). μ W cosecα [(r₁³ - r₂³)/(r₁² - r₂²)]
(2/3). μ W cosecα [(r₁³ - r₂³)/(r₁² - r₂²)]
A shaft carrying three rotors will have
No node
One node
Two nodes
Three nodes
Open pairs are those which have
Point or line contact between the two elements when in motion
Surface contact between the two elements when in motion
Elements of pairs not held together mechanically
Two elements that permit relative motion
Length of arc of contact is given by
Arc of approach - Arc of recess
Arc of approach + Arc of recess
Arc of approach / Arc of recess
Arc of approach × Arc of recess
The tendency of a body to resist change from rest or motion is known as
Mass
Friction
Inertia
Resisting force
The frictional torque transmitted by a cone clutch is same as that of
Flat pivot bearing
Flat collar bearing
Conical pivot bearing
Truncated conical pivot bearing
Creep in belt drive is due to
Material of the pulley
Material of the belt
Larger size of the driver pulley
Uneven extensions and contractions due to varying tension
The velocity of the belt for maximum power is (where m = Mass of the belt in kg per metre length)
T/3
(T.g)/3
√(T/3m)
√(3m/T)
Peaucelliers mechanism has
Eight links
Six links
Four links
Twelve links
Which of the following statement is correct as regard to the difference between a machine and a structure?
The parts of a machine move relative to one another, whereas the members of a structure do not move relative to one another
The links of a machine may transmit both power and motion, whereas the members of a structure transmit forces only
A machine transforms the available energy into some useful work, whereas in a structure no energy is transformed into useful work
All of the above
Which of the following statement is correct for gears?
The addendum is less than the dedendum
The pitch circle diameter is the product of module and number of teeth
The contact ratio means the number of pairs of teeth in contact
All of the above
The relation between number of links (l) and number of joints (j) in a kinematic chain is
l = (1/2).(j + 2)
l = (2/3).(j + 2)
l = (3/4).(j + 3)
l = j + 4
For S.H.M. cam, the acceleration of the follower at the ends of the stroke and aimed stroke respectively, is
Maximum and zero
Zero and maximum
Minimum and maximum
Zero and minimum
A Porter governor is a
Pendulum type governor
Dead weight governor
Spring loaded governor
Inertia governor
If the rotating mass of a rim type flywheel is distributed on another rim type flywheel whose mean radius is half the mean radius of the former, then energy stored in the latter at the same speed will be
Four times the first one
Same as the first one
One fourth of the first one
One and a half times the first one
In the below figure, PC is the connecting rod and OC is the crank making an angle θ with the line of stroke PO and rotates with uniform angular velocity at ω rad/s. The Klien's acceleration diagram for determining the acceleration of the piston P is shown by quadrilateral CQNO, if N coincides with O, then 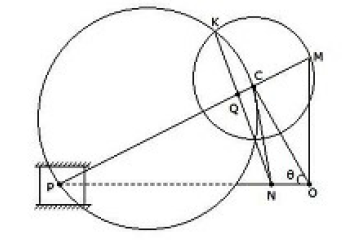
Acceleration and velocity of the piston P is zero
Acceleration and velocity of the piston P is maximum
Acceleration of the piston P is zero and its velocity is maximum
Acceleration of the piston P is maximum and its velocity is zero
Which of the following statement is wrong?
A round bar in a round hole form a turning pair
A square bar in a square hole form a sliding pair
A vertical shaft in a foot step bearing forms a successful constraint
All of the above
The Scott-Russell mechanism consists of
Sliding and turning pairs
Sliding and rotary pairs
Turning and rotary pairs
Sliding pairs only
The number of centers in a crank driven slider crank mechanism is
0
2
4
6
In a pantograph, all the pairs are
Turning pairs
Sliding pairs
Spherical pairs
Self-closed pairs
In a screw jack, the effort required to lift the load W is given by (where α = Helix angle, and φ = Angle of friction)
P = W tan(α - φ)
P = W tan(α + φ)
P = W tan(φ - α)
P = W cos(α + φ)
The Kutzbach criterion for determining the number of degrees of freedom (n) is (where l = number of links, j = number of joints and h = number of higher pairs)
n = 3(l - 1) - 2j - h
n = 2(l - 1) -2j - h
n = 3(l - 1) - 3j - h
n = 2(l - 1) - 3j - h
Coriolis component is encountered in
Quick return mechanism of shaper
Four bar chain mechanism
Slider crank mechanism
Both (A) and (C) above
The displacement of a flat faced follower when it has contact with the flank of a circular arc cam, is given by (where R = Radius of flank, r₁ = Minimum radius of the cam, and θ = Angle turned through by the cam)
R (1 - cosθ)
(R - r₁) (1 - cosθ)
R (1 - sinθ)
(R - r₁) (1 - sinθ)
A torsional system with discs of moment of inertia I₁ and I₂ as shown in the below figure, is gear driven such that the ratio of speed of shaft B to shaft A is 'G'. Neglecting the inertia of gears, the equivalent inertia of disc on shaft B at the speed of shaft A is equal to 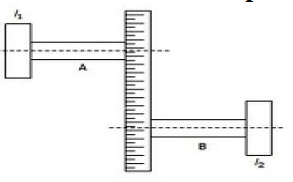
G.I₂
G².I₂
I₂/G
I₂/G²
Hammer blow
Is the maximum horizontal unbalanced force caused by the mass provided to balance the reciprocating masses.
Is the maximum vertical unbalanced force caused by the mass added to balance the reciprocating masses
Varies as the square root of the speed
Varies inversely with the square of the speed
In a mechanism, usually one link is fixed. If the fixed link is changed in a kinematic chain, then relative motion of other links
Will remain same
Will change
Could change or remain unaltered depending on which link is fixed
Will not occur
The velocity of the reciprocating roller follower when it has contact with the straight flanks of the tangent cam, is given by (where ω = Angular velocity of the cam shaft)
ω (r₁ r₂) sinθ
ω (r₁ + r₂) sinθ sec2θ
ω (r₁ r₂) cosθ
ω (r₁ + r₂) cosθ cosec2θ
The ratio of maximum fluctuation of speed to the mean speed is called
Fluctuation of speed
Maximum fluctuation of speed
Coefficient of fluctuation of speed
None of these