
A lead ball with a certain velocity is made to strike a wall, it falls down, but rubber ball of same mass and with same velocity strikes the same wall, it rebounds. Select the correct reason from the following:
Both the balls undergo an equal change in momentum
The change in momentum suffered by rubber ball is more than the lead ball
The change in momentum suffered by rubber ball is less than the lead ball
None of the above
Correct Answer :
B. The change in momentum suffered by rubber ball is more than the lead ball
Related Questions
In actual machines, mechanical advantage is __________ velocity ratio.
Equal to
Less than
Greater than
None of these
A block of mass 20 kg lying on a rough horizontal plane is connected by a light string passing over a smooth pulley to another mass 5 kg, which can move freely in the Vertical direction, as shown in the below figure. The tension in the string will __________ with the increase in coefficient of friction. 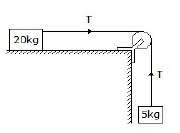
Increase
Decrease
Not be effected
None of these
The resultant of the two forces P and Q is R. If Q is doubled, the new resultant is perpendicular to P. Then
P = Q
Q = R
Q = 2R
None of these
The maximum frictional force which comes into play when a body just begins to slide over another surface is called
Limiting friction
Sliding friction
Rolling friction
Kinematic friction
The angle of inclination of the plane at which the body begins to move down the plane, is called
Angle of friction
Angle of repose
Angle of projection
None of these
The force required to move the body up the plane will be minimum if it makes an angle with the inclined plane __________ the angle of friction.
Equal to
Less than
Greater than
None of these
The linear velocity of a body rotating at ω rad/s along a circular path of radius r is given by
ω/r
ω.r
ω2/r
ω2.r
Two coplanar couples having equal and opposite moments
Balance each other
Produce a couple and an unbalanced force
Are equivalent
Cannot balance each other
A force acting on a body may
Change its motion
Balance the other forces acting on it
Retard its motion
All of the above
The linear acceleration (a) of a body rotating along a circular path of radius (r) with an angular acceleration of α rad/s2, is
a = α/ r
a = α.r
a = r / α
None of these
A heavy string attached at two ends at same horizontal level and when central dip is very small approaches the following curve
Circular arc
Parabola
Hyperbola
Elliptical
Lami's theorem states that
Three forces acting at a point will be in equilibrium
Three forces acting at a point can be represented by a triangle, each side being proportional to force
If three forces acting upon a particle are represented in magnitude and direction by the sides of a triangle, taken in order, they will be in equilibrium
If three forces acting at a point are in equilibrium, each force is proportional to the sine of the angle between the other two
The term 'Centroid' is
The same as centre of gravity
The point of suspension
The point of application of the resultant of all the forces tending to cause a body to rotate about a certain axis
None of the above
The bodies which rebound after impact are called
Inelastic bodies
Elastic bodies
Neither elastic nor inelastic bodies
None of these
A weight of 1000 N can be lifted by an effort of 80 N. If the velocity ratio is 20, the machine is
Reversible
Non-reversible
Ideal
None of these
Which of the following statement is correct?
The algebraic sum of the forces, constituting the couple is zero
The algebraic sum of the forces, constituting the couple, about any point is the same
A couple cannot be balanced by a single force but can be balanced only by a couple of opposite sense
All of the above
The resultant of two forces P and Q (such that P > Q) acting along the same straight line, but in opposite direction, is given by
P + Q
P - Q
P / Q
Q / P
A rubber ball is dropped from a height of 2 m. If there is no loss of velocity after rebounding, the ball will rise to a height of
1 m
2 m
3 m
4 m
The acceleration of a particle moving with simple harmonic motion, at any instant is given by
ω.y
ω2.y
ω2/y
ω3.y
Which of the following do not have identical dimensions?
Momentum and impulse
Torque and energy
Torque and work
Moment of a force and angular momentum.
A body of mass m moving with a constant velocity v strikes another body of same mass moving with same velocity but in opposite direction. The common velocity of both the bodies after collision is
v
2v
4v
8v
The total momentum of a system of masses (i. e. moving bodies) in any one direction remains constant, unless acted upon by an external force in that direction. This statement is called
Newton's first law of motion
Newton's second law of motion
Principle of conservation of energy
Principle of conservation of momentum
For any system of coplanar forces, the condition of equilibrium is that the
Algebraic sum of the horizontal components of all the forces should be zero
Algebraic sum of the vertical components of all the forces should be zero
Algebraic sum of moments of all the forces about any point should be zero
All of the above
A couple produces
Translatory motion
Rotational motion
Combined translatory and rotational motion
None of the above
Static friction is always __________ dynamic friction.
Equal to
Less than
Greater than
None of these
The acceleration of a body sliding down an inclined surface is
g sinθ
g cosθ
g tanθ
None of these
Which is the correct statement about law of polygon of forces?
If any number of forces acting at a point can be represented by the sides of a polygon taken in order, then the forces are in equilibrium
If any number of forces acting at a point can be represented in direction and magnitude by the sides of a polygon, then the forces are in equilibrium
If a polygon representing forces acting at a point is closed then forces are in equilibrium
If any number of forces acting at a point can be represented in direction and magnitude by the sides of a polygon taken in order, then the forces are in equilibrium
If a number of coplanar forces acting at a point be in equilibrium, the sum of clockwise moments must be __________ the sum of anticlockwise moments, about any point.
Equal to
Less than
Greater than
None of these
The unit of angular acceleration is
N-m
m/s
m/s2
rad/s2
The centre of gravity of a quadrant of a circle lies along its central radius (r) at a distance of
0.5r
0.6 r
0.7 r
0.8 r