
A rigid body, under the action of external forces, can be replaced by two masses placed at a fixed distance apart. The two masses form an equivalent dynamical system, if
The sum of the two masses is equal to the total mass of body
The centre of gravity of the two masses coincides with that of the body
The sum of mass moment of inertia of the masses about their centre of gravity is equal to the mass moment of inertia of the body
All of the above
Correct Answer :
D. All of the above
Related Questions
The distance by which the __________ of the D-slide valve overlaps the steam port is called exhaust lap.
Inner edge
Outer edge
Corners
None of these
The driving and driven shafts connected by a Hooke's joint will have equal speeds, if
cosθ = sinα
sinθ = ± tanα
tanθ = ± cosα
cotθ = cosα
When there is a reduction in amplitude over every cycle of vibration, then the body is said to have
Free vibration
Forced vibration
Damped vibration
Under damped vibration
A spring controlled governor is found unstable. It can be made stable by
Increasing the spring stiffness
Decreasing the spring stiffness
Increasing the ball mass
Decreasing the ball mass
Ball and a Socket forms a
Turning pair
Rolling pair
Screw pair
Spherical pair
If the number of links in a mechanism is equal to l, then the numbers of possible inversions are equal to
l - 2
l - 1
l
l + 1
The advantage of the piston valve over the slide valve is that in the former case
Wear is less
Power absorbed is less
Both wear and power absorbed are low
The pressure developed being high provides tight sealing
Which of the following mechanisms produces mathematically an exact straight line motion?
Grasshopper mechanism
Watt mechanism
Peaucellier's mechanism
Tchebicheff mechanism
A rigid body, under the action of external forces, can be replaced by two masses placed at a fixed distance apart. The two masses form an equivalent dynamical system, if
The sum of the two masses is equal to the total mass of body
The centre of gravity of the two masses coincides with that of the body
The sum of mass moment of inertia of the masses about their centre of gravity is equal to the mass moment of inertia of the body
All of the above
The Kutzbach criterion for determining the number of degrees of freedom (n) is (where l = number of links, j = number of joints and h = number of higher pairs)
n = 3(l - 1) - 2j - h
n = 2(l - 1) -2j - h
n = 3(l - 1) - 3j - h
n = 2(l - 1) - 3j - h
The unbalanced force due to reciprocating masses
Varies in magnitude but constant in direction
Varies in direction but constant in magnitude
Varies in magnitude and direction both
Constant in magnitude and direction both
For the brake to be self locking, the force P at C shown in the below figure, should 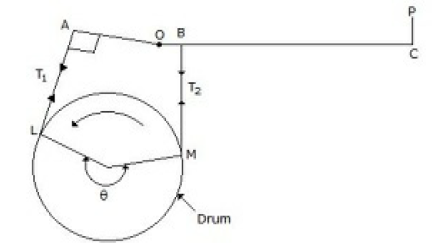
Be zero
Act in upward direction
Act in downward direction
None of these
Frequency of vibrations is usually expressed in
Number of cycles per hour
Number of cycles per minute
Number of cycles per second
None of these
The example of spherical pair is
Bolt and nut
Lead screw of a lathe
Ball and socket joint
Ball bearing and roller bearing
If some links are connected such that motion between them can take place in more than one direction, it is called
Incompletely constrained motion
Partially constrained motion
Completely constrained motion
Successfully constrained motion
A universal joint is an example of
Higher pair
Lower pair
Rolling pair
Sliding pair
The ratio of maximum fluctuation of energy to the workdone per cycle is called
Fluctuation of energy
Maximum fluctuation of energy
Coefficient of fluctuation of energy
None of these
In a mechanism, the fixed instantaneous centres are those centres which
Remain in the same place for all configurations of the mechanism
Vary with the configuration of the mechanism
Moves as the mechanism moves, but joints are of permanent nature
None of the above
What is the number of instantaneous centres for an eight link mechanism?
15
28
30
8
To transmit power from one rotating shaft to another whose axes are neither parallel nor intersecting, use?
Spur gear
Spiral gear
Bevel gear
Worm gear
The unbalanced force due to revolving masses
Varies in magnitude but constant in direction
Varies in direction but constant in magnitude
Varies in magnitude and direction both
Constant in magnitude and direction both
Which gear is used for connecting two coplanar and intersecting shafts?
Spur gear
Helical gear
Bevel gear
None of the above
3.The retardation of a flat faced follower when it has contact at the apex of the nose of a circular arc cam, is given by (where OQ = Distance between the centre of circular flank and centre of nose)
ω² × OQ
ω² × OQ sinθ
ω² × OQ cosθ
ω² × OQ tanθ
When the addenda on pinion and wheel is such that the path of approach and path of recess are half of their maximum possible values, then the length of the path of contact is given by (where r = Pitch circle radius of pinion, R = Pitch circle radius of wheel, and φ = Pressure angle)
[(r² + R²) cosφ]/2
[(r² + R²) sinφ]/2
[(r + R) cosφ]/2
[(r + R) sinφ]/2
The primary unbalanced force is maximum when the angle of inclination of the crank with the line of stroke is
0° and 90°
0° and 180°
90° and 180°
180° and 360°
In the two rotor system as shown in the below figure (I₁ < I₂), a node of vibration is situated 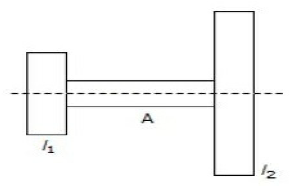
Between I₁, and I₂ but nearer I₁
Between I₁, and I₂ but nearer to I₂
Exactly in the middle of the shaft
Nearer to I₁ but outside
In a disc clutch, if there are n₁ number of discs on the driving shaft and n₂ number of discs on the driven shaft, then the number of pairs of contact surfaces will be
n₁ + n₂
n₁ + n₂ + 1
n₁ + n₂ - 1
n₁ + n₂ - 2
In a four bar chain or quadric cycle chain
Each of the four pairs is a turning pair
One is a turning pair and three are sliding pairs
Two are turning pairs and two are sliding pairs
Three are turning pairs and one is a sliding pair
In a locomotive, the maximum magnitude of the unbalanced force along the perpendicular to the line of stroke, is known as
Tractive force
Swaying couple
Hammer blow
None of these
Which of the following disciplines provides study of the relative motion between the parts of a machine and the forces acting on the parts?
Theory of machines
Applied mechanics
Mechanisms
Kinetics