
A spring controlled governor is said to be unstable when the controlling force
Increases as the radius of rotation decreases
Increases as the radius of rotation increases
Decreases as the radius of rotation increases
Remains constant for all radii of rotation
Correct Answer :
C. Decreases as the radius of rotation increases
Related Questions
The periodic time of one oscillation for a simple pendulum is
2π. √(g/l)
(1/2π). √(g/l)
2π. √(l/g)
(1/2π). √(l/g)
Which is the false statement about the properties of instantaneous centre?
At the instantaneous center of rotation, one rigid link rotates instantaneously relative to another for the configuration of mechanism considered
The two rigid links have no linear velocities relative to each other at the instantaneous centre
The two rigid links which have no linear velocity relative to each other at this center have the same linear velocity to the third rigid link
The double centre can be denoted either by O2 or O12, but proper selection should be made
In a steam engine, the earlier cut-off with a simple slide valve may be obtained by increasing the steam lap and the angle of advance of the eccentric but keeping constant the travel and lead of the valve, this method will
Cause withdrawing or throttling of steam
Reduce length of effective stroke of piston
Reduce maximum opening of port to steam
All of these
The Hooke's joint consists of:
Two forks
One fork
Three forks
Four forks
The acceleration of a flat-faced follower when it has contact with the flank of a circular arc cam, is given by
ω² R cosθ
ω² (R - r₁) cosθ
ω² (R - r₁) sinθ
ω² r₁ sinθ
Angle of action of cam is defined as the angle
Of rotation of the cam for a definite displacement of the follower
Through which the cam rotates during the period in which the follower remains in the highest position
Moved by the cam from the instant the follower begins to rise, till it reaches its highest position
Moved by the cam from beginning of ascent to the termination of descent
The frictional torque transmitted in a flat collar bearing, considering uniform wear, is (where r₁ and r₂ = External and internal radii of collar respectively)
(1/2) μ W (r₁ + r₂)
(2/3) μ W (r₁ + r₂)
(1/2) μ W [(r₁³ - r₂³)/(r₁² - r₂²)]
(2/3) μ W [(r₁³ - r₂³)/(r₁² - r₂²)]
The radial distance of a tooth from the pitch circle to the bottom of the tooth is called
Dedendum
Addendum
Clearance
Working depth
The example of spherical pair is
Bolt and nut
Lead screw of a lathe
Ball and socket joint
Ball bearing and roller bearing
The following is the inversion of slider crank chain mechanism
Whitworth quick return mechanism
Hand pump
Oscillating cylinder engine
All of the above
In order to balance the reciprocating masses,
Primary forces and couples must be balanced
Secondary forces and couples must be balanced
Both (A) and (B)
None of these
An automobile steering gear is an example of
Sliding pair
Rolling pair
Lower pair
Higher pair
To obviate axial thrust, following gear drive is used
Double helical gears having opposite teeth
Double helical gears having identical teeth
Single helical gear in which one of the teeth of helix angle a is more
Mutter gears
Which of the following mechanisms produces mathematically an exact straight line motion?
Grasshopper mechanism
Watt mechanism
Peaucellier's mechanism
Tchebicheff mechanism
The size of cam depends upon
Base circle
Pitch circle
Prime circle
Pitch curve
In a pantograph, all the pairs are
Turning pairs
Sliding pairs
Spherical pairs
Self-closed pairs
The displacement of a flat faced follower when it has contact with the flank of a circular arc cam, is given by (where R = Radius of flank, r₁ = Minimum radius of the cam, and θ = Angle turned through by the cam)
R (1 - cosθ)
(R - r₁) (1 - cosθ)
R (1 - sinθ)
(R - r₁) (1 - sinθ)
A body will begin to move down an inclined plane, if the angle of inclination of the plane is ________ the angle of friction.
Equal to
Less than
Greater than
None of these
Sensitiveness of the governor is defined as the ratio of the
Mean speed to the maximum equilibrium speed
Mean speed to the minimum equilibrium speed
Difference of the maximum and minimum equilibrium speeds to the mean speed
Sum of the maximum and minimum equilibrium speeds to the mean speed
For a twin cylinder V-engine, the crank positions for primary reverse cranks and secondary direct cranks are shown in the below figure. The engine is a 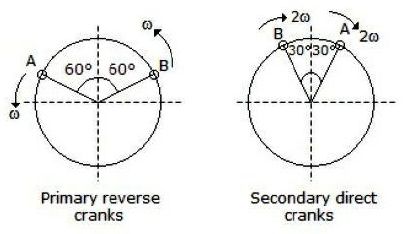
30° V-engine
60° V-engine
120° V-engine
150° V-engine
The lead screw of a lathe with nut forms a
Rolling pair
Sliding pair
Screw pair
Turning pair
The approximate straight line mechanism is a
Four bar linkage
6 bar linkage
8 bar linkage
3 bar linkage
The coriolis component of acceleration leads the sliding velocity by
45°
90°
135°
180°
The moment on the pulley which produces rotation is called
Inertia
Momentum
Moment of momentum
Torque
The velocity of the reciprocating roller follower when it has contact with the straight flanks of the tangent cam, is given by (where ω = Angular velocity of the cam shaft)
ω (r₁ r₂) sinθ
ω (r₁ + r₂) sinθ sec2θ
ω (r₁ r₂) cosθ
ω (r₁ + r₂) cosθ cosec2θ
Governor is used in automobile to
Decrease the variation of speed
Maximize the fuel economy
Limit the vehicle speed
Maintain constant engine speed
The frictional torque transmitted by a disc or plate clutch is same as that of
Flat pivot bearing
Flat collar bearing
Conical pivot bearing
Truncated conical pivot bearing
A Porter governor is a
Pendulum type governor
Dead weight governor
Spring loaded governor
Inertia governor
A simple spring-mass vibrating system has a natural frequency of fn. If the spring stiffness is halved and the mass is doubled, then the natural frequency will become
fn/2
2 fn
4 fn
8 fn
When a rigid body is suspended vertically and it oscillates with a small amplitude under the action of the force of gravity, the body is known as
Simple pendulum
Compound pendulum
Torsional pendulum
Second's pendulum