
A typewriter mechanism has 7 numbers of binary joints, six links and none of higher pairs. The mechanism is
Kinematically sound
Not sound
Soundness would depend upon which link is kept fixed
Data is not sufficient to determine same
Correct Answer :
A. Kinematically sound
Related Questions
A rigid body, under the action of external forces, can be replaced by two masses placed at a fixed distance apart. The two masses form an equivalent dynamical system, if
The sum of the two masses is equal to the total mass of body
The centre of gravity of the two masses coincides with that of the body
The sum of mass moment of inertia of the masses about their centre of gravity is equal to the mass moment of inertia of the body
All of the above
When a body moves with simple harmonic motion, the product of its periodic time and frequency is equal to
Zero
One
π/2
π
The brake commonly used in railway trains is
Shoe brake
Band brake
Band and block brake
Internal expanding brake
For a twin cylinder V-engine, the crank positions for primary reverse cranks and secondary direct cranks are shown in the below figure. The engine is a 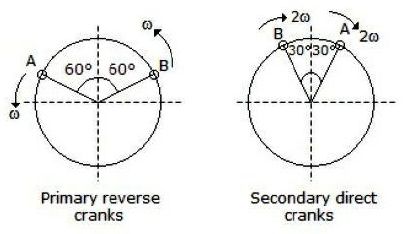
30° V-engine
60° V-engine
120° V-engine
150° V-engine
In S.H.M., acceleration is proportional to
Velocity
Displacement
Rate of change of velocity
All of the above
For a kinematic chain to be considered as mechanism
Two links should be fixed
One link should be fixed
None of the links should be fixed
There is no such criterion
A fixed gear having 200 teeth is in mesh with another gear having 50 teeth. The two gears are connected by an arm. The number of turns made by the smaller gear for one revolution of arm about the centre of bigger gear is
2
3
4
5
A point on a link connecting double slider crank chain traces a
Ellipse
Circle
Parabola
Hyperbola
The velocity of a flat-faced follower when it has contact with the flank of a circular arc cam, is given by
ωR cosθ
ω(R - r₁) cosθ
ω(R - r₁) sinθ
ωr₁ sinθ
A shaft has two heavy rotors mounted on it. The transverse natural frequencies, considering each of the rotor separately, are 100 Hz and 200 Hz respectively. The lowest critical speed is
5,367 r.p.m.
6,000 r.p.m.
9,360 r.p.m.
12,000 r.p.m.
Instantaneous center of rotation of a link in a four bar mechanism lies on
Right side pivot of this link
Left side pivot of this link
A point obtained by intersection on extending adjoining links
Cant occur
A governor is said to be stable, if the
Radius of rotation of balls increases as the equilibrium speed decreases
Radius of rotation of balls decreases as the equilibrium speed decreases
Radius of rotation of balls increases as the equilibrium speed increases
Radius of rotation of balls decreases as the equilibrium speed increases
Which of the following statement is wrong?
The difference between the maximum and minimum energies is called maximum fluctuation of energy
The coefficient of fluctuation of speed is the ratio of maximum fluctuation of speed to the mean speed
The variations of energy above and below the mean resisting torque line is known as fluctuation of energy
None of the above
The primary unbalanced force is maximum _________ in one revolution of the crank.
Twice
Four times
Eight times
Sixteen times
In a mechanism, usually one link is fixed. If the fixed link is changed in a kinematic chain, then relative motion of other links
Will remain same
Will change
Could change or remain unaltered depending on which link is fixed
Will not occur
Length of arc of contact is given by
Arc of approach - Arc of recess
Arc of approach + Arc of recess
Arc of approach / Arc of recess
Arc of approach × Arc of recess
The primary unbalanced force is maximum when the angle of inclination of the crank with the line of stroke is
0° and 90°
0° and 180°
90° and 180°
180° and 360°
In a simple harmonic motion, the velocity vector with respect to displacement vector
Is in phase
Leads by 90°
Leads by 180°
Lags by 90°
V-belts are usually used for
Long drives
Short drives
Long and short drives
None of these
The velocity of sliding __________ the distance of the point of contact from the pitch point.
Is directly proportional to
Is inversely proportional to
Is equal to cos φ multiplied by
Does not depend upon
The inversion of a mechanism is
Changing of a higher pair to a lower pair
Turning its upside down
Obtained by fixing different links in a kinematic chain
Obtained by reversing the input and output motion
In full depth involute system, the smallest number of teeth in a pinion which meshes with rack without interference is
12
16
25
32
In gramophones for adjusting the speed of the turntable, the following type of governor is commonly employed
Hartung governor
Wilson Hartnell governor
Pickering governor
Inertia governor
To connect two parallel and coplanar shafts the following type of gearing is used
Spur gear
Bevel gear
Spiral gear
None of the above
A universal joint is an example of
Higher pair
Lower pair
Rolling pair
Sliding pair
The tractive force is maximum or minimum when the angle of inclination of crank with the line of stroke (θ) is equal to
0° and 90°
90° and 180°
135° and 315°
270° and 360°
A rotor supported at A and B carries two masses as shown in the below figure. The rotor is 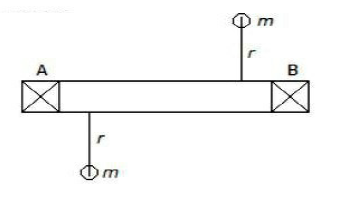
Dynamically balanced
Statically balanced
Statically and dynamically balanced
Not balanced
The amplitude of vibration is always __________ the radius of the circle.
Equal to
Less than
Greater than
None of these
Oldhams coupling is an inversion of the kinematic chain used in
Whitworth quick return mechanism
Elliptical trammels
Rotary engine
Universal joint
The number of links in pantograph mechanism is equal to
2
3
4
5