
ABCD is a four bar mechanism in which AB = 310 mm and CD = 450 mm. AB and CD are both perpendicular to the fixed link AD, as shown in the below figure. If the velocity of B at this condition is v. Then the velocity of C is 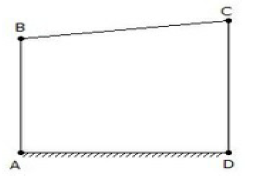
v
(2/3). v
(3/2). v
(9/4). v
Correct Answer :
C. (3/2). v
Related Questions
The cam follower generally used in aircraft engines is
Knife edge follower
Flat faced follower
Spherical faced follower
Roller follower
A completely constrained motion can be transmitted with.
1 link with pin joints
2 links with pin joints
3 links with pin joints
4 links with pin joints
Transmission angle is the angle between
Input link and coupler
Input link and fixed link
Output link and coupler
Output link and fixed link
A shaft carrying three rotors will have
No node
One node
Two nodes
Three nodes
The primary unbalanced force is maximum when the angle of inclination of the crank with the line of stroke is
0° and 90°
0° and 180°
90° and 180°
180° and 360°
In a cone pulley, if the sum of radii of the pulleys on the driving and driven shafts is Constant, then
Open belt drive is recommended
Crossed belt drive is recommended
Both open belt drive and crossed belt drive is recommended
The drive is recommended depending upon the torque transmitted
Power of a governor is the
Mean force exerted at the sleeve for a given percentage change of speed
Workdone at the sleeve for maximum equilibrium speed
Mean force exerted at the sleeve for maximum equilibrium speed
None of the above
Which of the following is an inversion of a double slider crank chain?
Oldham's coupling
Elliptical trammel
Scotch yoke mechanism
All of these
Oldham's coupling is the
Second inversion of double slider crank chain
Third inversion of double slider crank chain
Second inversion of single slider crank chain
Third inversion of slider crank chain
The coriolis component of acceleration is taken into account for
Slider crank mechanism
Four bar chain mechanism
Quick return motion mechanism
All of these
In a turning moment diagram, the variations of energy above and below the mean resisting torque line is called
Fluctuation of energy
Maximum fluctuation of energy
Coefficient of fluctuation of energy
None of these
The relation between number of links (l) and number of joints (j) in a kinematic chain is
l = (1/2).(j + 2)
l = (2/3).(j + 2)
l = (3/4).(j + 3)
l = j + 4
A circular bar moving in a round hole is an example of
Incompletely constrained motion
Partially constrained motion
Completely constrained motion
Successfully constrained motion
In a four-bar chain it is required to give an oscillatory motion to the follower for a continuous rotation of the crank. For the lengths of 50 mm of crank and 70 mm of the follower, determine theoretical maximum length of coupler. The distance between fixed pivots of crank and followers is
95 mm
Slightly less than 95 mm
Slightly more than 95 mm
45 mm
In a four stroke I.C. engine, the turning moment during the compression stroke is
Positive throughout
Negative throughout
Positive during major portion of the stroke
Negative during major portion of the stroke
The coriolis component of acceleration depends upon
Velocity of slider
Angular velocity of the link
Both (A) and (B)
None of these
A mechanism consisting of four links is called a __________ mechanism.
Simple
Compound
Binary
None of these
When two pulleys are connected by means of a cross belt drive, then both the pulleys will rotate in __________ directions.
Same
Opposite
Perpendicular
None of these
The main disadvantage of the sliding pair is that it is
Bulky
Wears rapidly
Difficult to manufacture
Both (A) and (B) above
The rotating shafts tend to vibrate violently at whirling speeds because
The system is unbalanced
Bearing centre line coincides with the axis
The shafts are rotating at very high speeds
Resonance is caused due to the heavy mass of the rotor
The Whitworth quick return motion mechanism is formed in a slider crank chain when the
Coupler link is fixed
Longest link is a fixed link
Slider is a fixed link
Smallest link is a fixed link
Hammer blow
Is the maximum horizontal unbalanced force caused by the mass provided to balance the reciprocating masses.
Is the maximum vertical unbalanced force caused by the mass added to balance the reciprocating masses
Varies as the square root of the speed
Varies inversely with the square of the speed
The minimum periodic time of a compound pendulum is
(1/2π). √(kG/g)
(1/2π). √(2kG/g)
2π. √(kG/g)
2π. √(2kG/g)
A rigid body, under the action of external forces, can be replaced by two masses placed at a fixed distance apart. The two masses form an equivalent dynamical system, if
The sum of the two masses is equal to the total mass of body
The centre of gravity of the two masses coincides with that of the body
The sum of mass moment of inertia of the masses about their centre of gravity is equal to the mass moment of inertia of the body
All of the above
The natural frequency of free longitudinal vibrations is equal to (where m = Mass of the body, s = Stiffness of the body, and δ = Static deflection of the body)
1/2π × √(s/m)
1/2π × √(g/δ)
0.4985/√δ
Any one of these
When the particles of a body moves perpendicular to its axis, then the body is said to have
Longitudinal vibration
Transverse vibration
Torsional vibration
None of these
The working depth of a gear is the radial distance from the
Pitch circle to the bottom of a tooth
Pitch circle to the top of a tooth
Top of a tooth to the bottom of a tooth
Addendum circle to the clearance circle
A slider moves at a velocity v on a link revolving at ω rad/s. The coriolis component of acceleration is
ωv
2ωv
ω²v
2ωv²
A spring controlled governor is said to be isochronous when the controlling force
Increases as the radius of rotation decreases
Increases as the radius of rotation increases
Decreases as the radius of rotation increases
Remain constant for all radii of rotation
Two pulleys of radii r₁ and r₂ and at distance x apart are connected by means of an open belt drive. The length of the belt is
π (r₁ + r₂) + (r₁ + r₂)²/x + 2x
π (r₁ + r₂) + (r₁ - r₂)²/x + 2x
π (r₁ - r₂) + (r₁ - r₂)²/x + 2x
π (r₁ - r₂) + (r₁ + r₂)²/x + 2x