
Hammer blow
Is the maximum horizontal unbalanced force caused by the mass provided to balance the reciprocating masses.
Is the maximum vertical unbalanced force caused by the mass added to balance the reciprocating masses
Varies as the square root of the speed
Varies inversely with the square of the speed
Correct Answer :
B. Is the maximum vertical unbalanced force caused by the mass added to balance the reciprocating masses
Related Questions
The driving and driven shafts connected by a Hooke's joint will have equal speeds, if
cosθ = sinα
sinθ = ± tanα
tanθ = ± cosα
cotθ = cosα
The danger of breakage and vibration is maximum
Below the critical speed
Near the critical speed
Above the critical speed
None of these
Angle of descent of cam is defined as the angle
During which the follower returns to its initial position
Of rotation of the cam for a definite displacement of the follower
Through which the cam rotates during the period in which the follower remains in the highest position
Moved by the cam from the instant the follower begins to rise, till it reaches its highest position
A Hartnell governor is a
Dead weight governor
Pendulum type governor
Spring loaded governor
Inertia governor
A slider moves at a velocity v on a link revolving at ω rad/s. The coriolis component of acceleration is
ωv
2ωv
ω²v
2ωv²
The two elements of a pair are said to form a higher pair, when they
Have a surface contact when in motion
Have a line or point contact when in motion
Are kept in contact by the action of external forces, when in motion
Permit relative motion
The fundamental equation for correct steering is (where φ and α = Angle through which the axis of the outer wheel and inner wheel turns respectively, c = Distance between the pivots of the front axles, and d = Wheel base)
sinφ + sinα = b/c
cosφ - sinα = c/b
cotφ - cotα = c/b
tanφ + cotα = b/c
When a point moves along a straight line, its acceleration will have
Radial component only
Tangential component only
Coriolis component only
Radial and tangential components both
The efficiency of a screw jack is maximum, when (where α = Helix angle, and φ = Angle of friction)
α = 45° + φ/2
α = 45° - φ/2
α = 90° + φ
α = 90° - φ
A disc is a spinning with an angular velocity ω rad/s about the axis of spin. The couple applied to the disc causing precession will be (where I = Mass moment of inertia of the disc, and ωP = Angular velocity of precession of the axis of spin)
(1/2).Iω²
Iω²
(1/2). I ω ωP
I ω ωP
In a cam drive with uniform velocity follower, the sharp corners of the displacement diagram are rounded off at the beginning and at the end of each stroke. This is done
Because of difficulty in manufacturing cam profile
Because of loose contact of follower with cam surface
In order to have acceleration in beginning and retardation at the end of stroke within the finite limits
Because the uniform velocity motion is a partial parabolic motion
The method of direct and reverse cranks is used in engines for
The control of speed fluctuations
Balancing of forces and couples
Kinematic analysis
Vibration analysis
A pantograph is a mechanism with
Lower pairs
Higher pairs
Rolling pairs
Turning pairs
In order to give a complete secondary balance of a multi-cylinder inline engine,
The algebraic sum of the secondary forces must be equal to zero
The algebraic sum of the couples about any point in the plane of the secondary forces must be equal to zero
Both (A) and (B)
None of these
The frictional torque transmitted in a truncated conical pivot bearing, considering uniform wear, is
(1/2). μ W cosec α (r₁ + r₂)
(2/3).μ W cosec α (r₁ + r₂)
(1/2). μ W cosec α [(r₁³ - r₂³)/(r₁² - r₂²)]
(2/3). μ W cosec α [(r₁³ - r₂³)/(r₁² - r₂²)]
Two pulleys of radii r₁ and r₂ and at distance x apart are connected by means of an open belt drive. The length of the belt is
π (r₁ + r₂) + (r₁ + r₂)²/x + 2x
π (r₁ + r₂) + (r₁ - r₂)²/x + 2x
π (r₁ - r₂) + (r₁ - r₂)²/x + 2x
π (r₁ - r₂) + (r₁ + r₂)²/x + 2x
For the brake to be self locking, the force P at C shown in the below figure, should 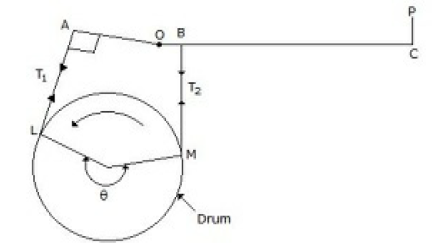
Be zero
Act in upward direction
Act in downward direction
None of these
The tractive force is maximum or minimum when the angle of inclination of crank with the line of stroke (θ) is equal to
0° and 90°
90° and 180°
135° and 315°
270° and 360°
The ratio of the driving tensions for V-belts is __________ times that of flat belts. (Where β = Semi-angle of the groove)
sinβ
cosβ
cosecβ
secβ
The natural frequency of free longitudinal vibrations is equal to (where m = Mass of the body, s = Stiffness of the body, and δ = Static deflection of the body)
1/2π × √(s/m)
1/2π × √(g/δ)
0.4985/√δ
Any one of these
The instantaneous centres which vary with the configuration of mechanism are called
Permanent instantaneous centres
Fixed instantaneous centres
Neither fixed nor permanent instantaneous centres
None of the above
If the controlling force line for a spring controlled governor when produced intersects the Y-axis at the origin, then the governor is said to be
Stable
Unstable
Isochronous
None of these
Which of the following statement is wrong?
A round bar in a round hole form a turning pair
A square bar in a square hole form a sliding pair
A vertical shaft in a foot step bearing forms a successful constraint
All of the above
The contact ratio for gears is
Zero
Less than one
Greater than one
Infinity
A body of weight W is required to move up the rough inclined plane whose angle of inclination with the horizontal is α. The effort applied parallel to the plane is given by (where μ = tan φ = Coefficient of friction between the plane and the body)
P = W tan α
P = W tan (α + φ)
P = W (sin α + μ cos α)
P = W (cos α + μ sin α)
The rotor of a ship rotates in clockwise direction when viewed from stern and the ship takes a left turn. The effect of gyroscopic couple acting on it will be
To raise the bow and stern
To lower the bow and stern
To raise the bow and lower the stern
To raise the stern and lower the bow
The velocity of piston in a reciprocating steam engine is given by (where ω = Angular velocity of crank, r = Radius of crank pin circle, θ = Angle turned by crank from inner dead centre, and n = Ratio of length of connecting rod to the radius of crank)
ωr [sin θ + (sin 2θ/n)]
ωr [cos θ + (cos 2θ/n)]
ω²r [sin θ + (sin 2θ/n)]
ω²r [cos θ + (cos 2θ/n)]
In a drag link quick return mechanism, the shortest link is always fixed. The sum of the shortest and longest link is
Equal to sum of other two
Greater than sum of other two
Less than sum of other two
There is no such relationship
When two links are connected by a pin joint, their instantaneous centre lies
On their point of contact
At the centre of curvature
At the centre of circle
At the pin joint
Which of the following is an inversion of a single slider crank chain?
Pendulum pump
Oscillating cylinder engine
Rotary internal combustion engine
All of these