
In a pantograph, all the pairs are
Turning pairs
Sliding pairs
Spherical pairs
Self-closed pairs
Correct Answer :
A. Turning pairs
Related Questions
The magnitude of velocities of the points on a rigid link is
Directly proportional to the distance from the points to the instantaneous centre and is parallel to the line joining the point to the instantaneous centre
Directly proportional to the distance from the points to the instantaneous centre and is perpendicular to the line joining the point to the instantaneous centre
Inversely proportional to the distance from the points to the instantaneous centre and is parallel to the line joining the point to the instantaneous centre
Inversely proportional to the distance from the points to the instantaneous centre and is perpendicular to the line joining the point to the instantaneous centre
The relation between the controlling force (Fc) and radius of rotation (r) for a stable spring controlled governor is
Fc = ar + b
Fc = ar - b
Fc = ar
Fc = a/r + b
When a body moves with simple harmonic motion, the product of its periodic time and frequency is equal to
Zero
One
π/2
π
Whirling speed of the shaft is the speed at which
Shaft tends to vibrate in longitudinal direction
Torsional vibrations occur
Shaft tends to vibrate vigorously in transverse direction
Combination of transverse and longitudinal vibration occurs
The example of completely constrained motion is a
Motion of a piston in the cylinder of a steam engine
Motion of a square bar in a square hole
Motion of a shaft with collars at each end in a circular hole
All of the above
When the addenda on pinion and wheel is such that the path of approach and path of recess are half of their maximum possible values, then the length of the path of contact is given by (where r = Pitch circle radius of pinion, R = Pitch circle radius of wheel, and φ = Pressure angle)
[(r² + R²) cosφ]/2
[(r² + R²) sinφ]/2
[(r + R) cosφ]/2
[(r + R) sinφ]/2
It is required to connect two parallel shafts, the distance between whose axes is small and variable. The shafts are coupled by
Universal joint
Knuckle joint
Oldham's coupling
Flexible coupling
The critical speed of a shaft with a disc supported in between is equal to the natural frequency of the system in
Transverse vibrations
Torsional vibrations
Longitudinal vibrations
All of these
The rotor of a ship rotates in clockwise direction when viewed from stern and the ship takes a left turn. The effect of gyroscopic couple acting on it will be
To raise the bow and stern
To lower the bow and stern
To raise the bow and lower the stern
To raise the stern and lower the bow
Which one of the following is an exact straight line mechanism using lower pairs?
Watts mechanism
Grasshopper mechanism
Roberts mechanism
Peaucelliers mechanism
Hammer blow
Is the maximum horizontal unbalanced force caused by the mass provided to balance the reciprocating masses.
Is the maximum vertical unbalanced force caused by the mass added to balance the reciprocating masses
Varies as the square root of the speed
Varies inversely with the square of the speed
A simple spring-mass vibrating system has a natural frequency of fn. If the spring stiffness is halved and the mass is doubled, then the natural frequency will become
fn/2
2 fn
4 fn
8 fn
In order to double the period of a simple pendulum, the length of the string should be
Halved
Doubled
Quadrupled
None of these
Bifilar suspension method is used to find the
Angular acceleration of the body
Moment of inertia of the body
Periodic time of the body
Frequency of vibration of the body
The acceleration of a particle moving with simple harmonic motion, at any instant is given by
ωx
ω²x
ω²/x
ω³/x
In gears, interference takes place when
The tip of a tooth of a mating gear digs into the portion between base and root circles
Gears do not move smoothly in the absence of lubrication
Pitch of the gears is not same
Gear teeth are undercut
In order to facilitate starting of locomotive in any position, the cranks of a locomotive with two cylinders, are placed at
45° to each other
90° to each other
120° to each other
180° to each other
The main disadvantage of the sliding pair is that it is
Bulky
Wears rapidly
Difficult to manufacture
Both (A) and (B) above
In a differential band brake as shown in the below figure, the drum rotates anticlockwise and the greater tension T₁ acts at A and smaller tension T₂ at B. Length OA is greater than length OB. In order to apply the brake, the force P at C should 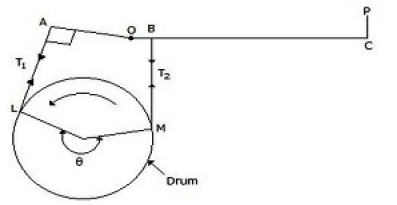
Be zero
Act in upward direction
Act in downward direction
None of the above
In S.H.M., the velocity vector w.r.t. displacement vector
Leads by 90°
Lags by 90°
Leads by 180°
Are in phase
In a four bar chain or quadric cycle chain
Each of the four pairs is a turning pair
One is a turning pair and three are sliding pairs
Two are turning pairs and two are sliding pairs
Three are turning pairs and one is a sliding pair
Which type of gear train is used in clock mechanism to join hour hand and minute hand?
Simple gear train
Compound gear train
Reverted gear train
Epicyclic gear train
The coriolis component of acceleration is taken into account for
Slider crank mechanism
Four bar chain mechanism
Quick return motion mechanism
All of these
Which of the following mechanism is obtained from lower pair?
Gyroscope
Pantograph
Valve and valve gears
All of the above
Which of the following statement is correct?
The power absorbed in operating the piston valve is less than D-slide valve
The wear of the piston valve is less than the wear of the D-slide valve
The D-slide valve is also called outside admission valve.
All of the above
To obviate axial thrust, following gear drive is used
Double helical gears having opposite teeth
Double helical gears having identical teeth
Single helical gear in which one of the teeth of helix angle a is more
Mutter gears
In a rigid link OA, velocity of A w.r.t. O will be
Parallel to OA
Perpendicular to OA
At 45° to OA
Along AO
The moment on the pulley which produces rotation is called
Inertia
Momentum
Moment of momentum
Torque
A rigid body, under the action of external forces, can be replaced by two masses placed at a fixed distance apart. The two masses form an equivalent dynamical system, if
The sum of the two masses is equal to the total mass of body
The centre of gravity of the two masses coincides with that of the body
The sum of mass moment of inertia of the masses about their centre of gravity is equal to the mass moment of inertia of the body
All of the above
When there is a reduction in amplitude over every cycle of vibration, then the body is said to have
Free vibration
Forced vibration
Damped vibration
Under damped vibration