
In elliptical trammels
All four pairs are turning
Three pairs turning and one pair sliding
Two pairs turning and two pairs sliding
One pair turning and three pairs sliding
Correct Answer :
C. Two pairs turning and two pairs sliding
Related Questions
In a radial cam, the follower moves
In a direction perpendicular to the cam axis
In a direction parallel to the cam axis
In any direction irrespective of the cam axis
Along the cam axis
For simple harmonic motion of the of follower, a cosine curve represents
Displacement diagram
Velocity diagram
Acceleration diagram
All of the above
If the number of links in a mechanism is equal to l, then the numbers of possible inversions are equal to
l - 2
l - 1
l
l + 1
In a steam engine, the earlier cut-off with a simple slide valve may be obtained by increasing the steam lap and the angle of advance of the eccentric but keeping constant the travel and lead of the valve, this method will
Cause withdrawing or throttling of steam
Reduce length of effective stroke of piston
Reduce maximum opening of port to steam
All of these
The engine of an aeroplane rotates in clockwise direction when seen from the tail end and the aeroplane takes a turn to the left. The effect of gyroscopic couple on the aeroplane will be
To dip the nose and tail
To raise the nose and tail
To raise the nose and dip the tail
To dip the nose and raise the tail
The secondary unbalanced force due to inertia of reciprocating parts in a reciprocating engine is given by (where m = Mass of reciprocating parts, ω = Angular speed of crank, r = Radius of crank, θ = Angle of inclination of crank with the line of stroke, and n = Ratio of the length of connecting rod to radius of crank)
m.ω².r sinθ
m.ω².r cosθ
m.ω².r (sin 2θ/n)
m.ω².r (cos 2θ/n)
In which of the following type of gear train the first gear and the last gear are co-axial.
Simple gear train
Compound gear train
Reverted gear train
None of the above
The factional torque for square thread at the mean radius r while raising load W is given by
T = W.r tan(φ - α)
T = W.r tan(φ + α)
T = W.r tanα
T = W.r tanφ
Davis steering gear consists of
Sliding pairs
Turning pairs
Rolling pairs
Higher pairs
In an ideal machine, the output as compared to input is
Less
More
Equal
May be less or more depending on efficiency
The condition for correct steering of a Davis steering gear is (where α = Angle of inclination of the links to the vertical)
sinα = b/c
cosα = c/b
tanα = c/2b
cotα = c/2b
The absolute acceleration of any point P in a link about center of rotation O is
Along PO
Perpendicular to PO
At 45° to PO
None of the above
Pitch point on a cam is
Any point on pitch curve
The point on cam pitch curve having the maximum pressure angle
Any point on pitch circle
The point on cam pitch curve having the minimum pressure angle
A point on a link connecting double slider crank chain traces a
Ellipse
Circle
Parabola
Hyperbola
The total number of instantaneous centres for a mechanism consisting of n links are
n/2
n
n - 1
n(n - 1)/2
A body in motion will be subjected to coriolis acceleration when that body is
In plane rotation with variable velocity
In plane translation with variable velocity
In plane motion which is a resultant of plane translation and rotation
Restrained to rotate while sliding over another body
The Coriolis component of acceleration acts
Along the sliding surface
Perpendicular to the sliding surface
At 45° to the sliding surface
Parallel to the sliding surface
The frictional torque transmitted in a truncated conical pivot bearing, considering uniform pressure, is
(1/2). μ W cosecα (r₁ + r₂)
(2/3). μ W cosecα (r₁ + r₂)
(1/2). μ W cosecα [(r₁³ - r₂³)/(r₁² - r₂²)]
(2/3). μ W cosecα [(r₁³ - r₂³)/(r₁² - r₂²)]
The frictional torque transmitted in a conical pivot bearing, considering uniform wear, is
(1/2) μ W R cosec α
(2/3) μ W R cosec α
(3/4) μ W R cosec α
μ W R cosec α
The acceleration of a particle at any instant has two components i.e. radial component and tangential component. These two components will be
Parallel to each other
Perpendicular to each other
Inclined at 45°
Opposite to each other
An eccentric sheave pivoted at one point rotates and transmits oscillatory motion to a link whose one end is pivoted and other end is connected to it. This mechanism has
2 links
3 links
4 links
5 links
A rotor supported at A and B carries two masses as shown in the below figure. The rotor is 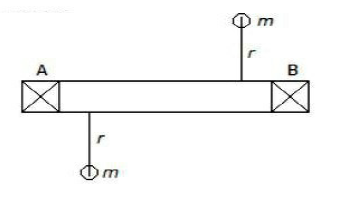
Dynamically balanced
Statically balanced
Statically and dynamically balanced
Not balanced
The example of higher pair is
Belt, rope and chain drives
Gears, cams
Ball and roller bearings
All of the above
The number of centers in a crank driven slider crank mechanism is
0
2
4
6
The acceleration of the reciprocating roller follower when it has contact with the straight flanks of the tangent cam, is given by
ω². (r₁ r₂). (1 - cos² θ)
ω². (r₁ + r₂). (1 + cos² θ)
ω². (r₁ + r₂). [(2 - cos² θ)/cos³ θ]
ω². (r₁ - r₂). (1 - sin² θ)
Which is the false statement about the properties of instantaneous centre?
At the instantaneous center of rotation, one rigid link rotates instantaneously relative to another for the configuration of mechanism considered
The two rigid links have no linear velocities relative to each other at the instantaneous centre
The two rigid links which have no linear velocity relative to each other at this center have the same linear velocity to the third rigid link
The double centre can be denoted either by O2 or O12, but proper selection should be made
The balancing of a rigid rotor can be achieved by appropriately placing balancing masses in
A single plane
Two planes
Three planes
Four planes
In a system subjected to damped forced vibrations, the ratio of maximum displacement to the static deflection is known as
Critical damping ratio
Damping factor
Logarithmic decrement
Magnification factor
Power of a governor is the
Mean force exerted at the sleeve for a given percentage change of speed
Workdone at the sleeve for maximum equilibrium speed
Mean force exerted at the sleeve for maximum equilibrium speed
None of the above
Angular acceleration of a link can be determined by dividing the
Centripetal component of acceleration with length of link
Tangential component of acceleration with length of link
Resultant acceleration with length of link
All of the above