
In order to double the period of a simple pendulum, the length of the string should be
Halved
Doubled
Quadrupled
None of these
Correct Answer :
C. Quadrupled
Related Questions
The ratio of the maximum displacement of the forced vibration to the deflection due to the static force, is known as
Damping factor
Damping coefficient
Logarithmic decrement
Magnification factor
With single Hooke's joint it is possible to connect two shafts, the axes of which have an angular misalignment up to
10°
20°
30°
40°
When the pitching of a ship is __________ the effect of gyroscopic couple acting on it will be to move the ship towards port side.
Upward
Downward
Forward
Backward
The secondary unbalanced force is maximum __________ in one revolution of the crank.
Two times
Four times
Eight times
Sixteen times
Which of the following statement is correct for involute gears?
The interference is inherently absent.
The variation in centre distance of shafts increases radial force.
A convex flank is always in contact with concave flank.
The pressure angle is constant throughout the teeth engagement.
The face of the tooth is the
Surface of the top of tooth
Surface of tooth above the pitch surface
Width of tooth below the pitch surface
Width of tooth measured along the pitch circle
When the crank is at the outer dead centre, in a reciprocating steam engine, then the acceleration of the piston will be
ω² r {(n + 1)/n}
ω² r {(n - 1)/n}
ω² r {n/(n + 1)}
ω² r {n/(n - 1)}
When the speed of the engine fluctuates continuously above and below the mean speed, the governor is said to be
Stable
Unstable
Isochronous
Hunt
The Kutzbach criterion for determining the number of degrees of freedom (n) is (where l = number of links, j = number of joints and h = number of higher pairs)
n = 3(l - 1) - 2j - h
n = 2(l - 1) -2j - h
n = 3(l - 1) - 3j - h
n = 2(l - 1) - 3j - h
In a drag link quick return mechanism, the shortest link is always fixed. The sum of the shortest and longest link is
Equal to sum of other two
Greater than sum of other two
Less than sum of other two
There is no such relationship
For S.H.M. cam, the acceleration of the follower at the ends of the stroke and aimed stroke respectively, is
Maximum and zero
Zero and maximum
Minimum and maximum
Zero and minimum
The critical speed of a shaft in revolution per second is __________ as that of natural frequency of transverse vibration.
Same
Different
Unpredictable
None of these
The cam and follower is an example of
Sliding pair
Rolling pair
Lower pair
Higher pair
In a steam engine, the earlier cut-off with a simple slide valve may be obtained by increasing the steam lap and the angle of advance of the eccentric but keeping constant the travel and lead of the valve, this method will
Cause withdrawing or throttling of steam
Reduce length of effective stroke of piston
Reduce maximum opening of port to steam
All of these
A machine mounted on a single coil spring has a period of free vibration of tp . If the spring is cut into four equal parts and placed in parallel and the machine is mounted on them, then the period of free vibration of the new system will become
tp /16
tp /4
4 tp
16 tp
The size of cam depends upon
Base circle
Pitch circle
Prime circle
Pitch curve
Which of the following is false statement in respect of differences between machine and structure?
Machines transmit mechanical work, whereas structures transmit forces
In machines, relative motion exists between its members, whereas same does not exist in case of structures
Machines modify movement and work, whereas structures modify forces
Efficiency of machines as well as structures is below 100%
In an open pair, the two elements of a pair
Have a surface contact when in motion
Have a line or point contact when in motion
Are kept in contact by the action of external forces, when in motion
Are not held together mechanically
When the body is suspended at the point of suspension, its periodic time and frequency will be ________ as compared to the body suspended at the point of percussion.
Same
Two times
Four times
None of these
An imaginary circle which by pure rolling action, gives the same motion as the actual gear, is called
Addendum circle
Dedendum circle
Pitch circle
Clearance circle
The instantaneous centres which vary with the configuration of mechanism are called
Permanent instantaneous centres
Fixed instantaneous centres
Neither fixed nor permanent instantaneous centres
None of the above
A foot step bearing and rotor of a vertical turbine form examples of
Incompletely constrained motion
Partially constrained motion
Completely constrained motion
Successfully constrained motion
In a differential band brake as shown in the below figure, if the length OB is greater than OA, then the force P at C should act in the downward direction. 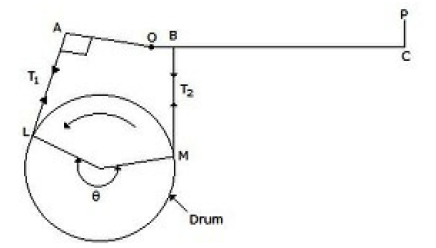
Yes
No
Unpredictable
None of these
It is required to connect two parallel shafts, the distance between whose axes is small and variable. The shafts are coupled by
Universal joint
Knuckle joint
Oldham's coupling
Flexible coupling
The frequency of oscillation of a compound pendulum is
2π. √[gh/(kG² + h²)]
2π. √[(kG² + h²)/gh]
(1/2π). √[gh/(kG² + h²)]
(1/2π). √[(kG² + h²)/gh]
If the damping factor for a vibrating system is unity, then the system will be
Over damped
Under damped
Critically damped
Without vibrations
The type of gears used to connect two non parallel and non intersecting shafts is
Spur gear
Helical gear
Bevel gear
Spiral gear
A system in dynamic balance implies that
The system is critically damped
There is no critical speed in the system
The system is also statically balanced
There will absolutely no wear of bearings
The component of the acceleration, perpendicular to the velocity of the particle, at the given instant is called
Radial component
Tangential component
Coriolis component
None of these
The frictional torque transmitted in a flat pivot bearing, considering uniform wear, is (where μ = Coefficient of friction, W = Load over the bearing, and R = Radius of bearing surface)
(1/2) μ W R
(2/3) μ W R
(3/4) μ W R
μ W R