
________ is an inversion of Double slider crank chain.
Coupling rod of a locomotive
Scotch yoke mechanism
Hand pump
Reciprocating engine
Correct Answer :
B. Scotch yoke mechanism
Related Questions
The lower pair is a
Open pair
Closed pair
Sliding pair
Point contact pair
A rotor supported at A and B carries two masses as shown in the below figure. The rotor is 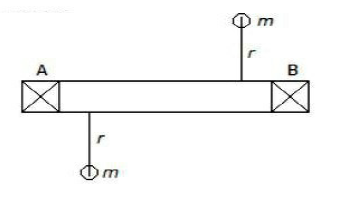
Dynamically balanced
Statically balanced
Statically and dynamically balanced
Not balanced
Which of the following mechanism is obtained from lower pair?
Gyroscope
Pantograph
Valve and valve gears
All of the above
The secondary unbalanced force is maximum when the angle of inclination of the crank with the line of stroke is
0° and 90°
180° and 360°
Both (A) and (B)
None of these
The Ackerman steering gear mechanism is preferred to the Davis steering gear mechanism, because
Whole of the mechanism in the Ackerman steering gear is on the back of the front wheels
The Ackerman steering gear consists of turning pairs
The Ackerman steering gear is most economical
Both (A) and (B)
The C.G. of a link in any mechanism would experience
No acceleration
Linear acceleration
Angular acceleration
Both angular and linear accelerations
For the brake to be self locking, the force P at C shown in the below figure, should 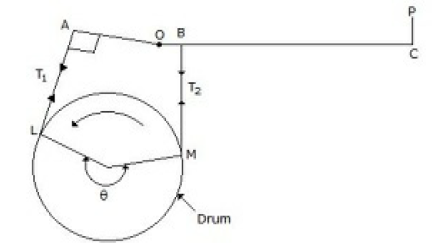
Be zero
Act in upward direction
Act in downward direction
None of these
The maximum efficiency of spiral gears is (where θ = Shaft angle, and φ = Friction angle)
sin (θ + φ) + 1/ cos (θ - φ) + 1
cos (θ - φ) + 1/ sin (θ + φ) + 1
cos (θ + φ) + 1/ cos (θ - φ) + 1
cos (θ - φ) + 1/ cos (θ + φ) + 1
Two pulleys of radii r₁ and r₂ and at distance x apart are connected by means of an open belt drive. The length of the belt is
π (r₁ + r₂) + (r₁ + r₂)²/x + 2x
π (r₁ + r₂) + (r₁ - r₂)²/x + 2x
π (r₁ - r₂) + (r₁ - r₂)²/x + 2x
π (r₁ - r₂) + (r₁ + r₂)²/x + 2x
TJIE horse power transmitted by a belt is dependent upon
Tension on tight side of belt
Tension on slack side of belt
Radius of pulley
All of the above
Which of the following has sliding motion?
Crank
Connecting rod
Crank pin
Crosshead
The relative velocity of B with respect to A in a rigid link AB is
Parallel to AB
Perpendicular to AB
Along AB
At 45° to AB
A body in motion will be subjected to coriolis acceleration when that body is
In plane rotation with variable velocity
In plane translation with variable velocity
In plane motion which is a resultant of plane translation and rotation
Restrained to rotate while sliding over another body
A body is said to be under forced vibrations, when
There is a reduction in amplitude after every cycle of vibration
No external force acts on a body, after giving it an initial displacement
A body vibrates under the influence of external force
None of the above
Hart mechanism has
Eight links
Six links
Four links
Twelve links
The velocity of a flat-faced follower when it has contact with the flank of a circular arc cam, is given by
ωR cosθ
ω(R - r₁) cosθ
ω(R - r₁) sinθ
ωr₁ sinθ
For fluctuating loads, well suited bearing is
Ball bearing
Roller bearing
Needle roller bearing
Thrust bearing
In a coupling rod of a locomotive, each of the four pairs is a ________ pair.
Sliding
Turning
Rolling
Screw
Typewriter constitutes
Machine
Structure
Mechanism
Inversion
Maximum fluctuation of energy in a flywheel is equal to [where I = Mass moment of inertia of the flywheel, E = Maximum fluctuation of energy, CS = Coefficient of fluctuation of speed, and ω = Mean angular speed = (ω₁ + ω₂)/2]
I.ω.(ω₁ - ω₂)
I.ω².CS
2.E.CS
All of these
For dynamic balancing of a shaft
The net dynamic force acting on the shaft is equal to zero
The net couple due to the dynamic forces acting on the shaft is equal to zero
Both (A) and (B)
None of the above
When the crank is at the inner dead centre, in a reciprocating steam engine, then the acceleration of the piston will be
ω²r. (n + 1)/n
ω²r. (n - 1)/n
ω²r. n/(n + 1)
ω²r. n/(n - 1)
A mechanism __________ for transmitting or transforming motion.
Can be used
Cannot be used
Unpredictable
None of these
In a Hartnell governor, the lift of the sleeve is given by (where r₁ and r₂ = Max. and min. radii of rotation, x = Length of ball arm of the lever, and y = Length of sleeve arm of the lever)
(r₁ + r₂) (y/x)
(r₁ + r₂) (x/y)
(r₁ - r₂) (y/x)
(r₁ - r₂) (x/y)
Which one of the following is an exact straight line mechanism using lower pairs?
Watts mechanism
Grasshopper mechanism
Roberts mechanism
Peaucelliers mechanism
The type of gears used to connect two non parallel and non intersecting shafts is
Spur gear
Helical gear
Bevel gear
Spiral gear
In a pantograph, all the pairs are
Turning pairs
Sliding pairs
Spherical pairs
Self-closed pairs
The frictional torque transmitted in a flat pivot bearing, assuming uniform wear, is (Where μ = Coefficient of friction, W=Load over the bearing, R=Radius of bearing)
μwr
¾μWR
(2/3) μWR
½μWR
A torsional system with discs of moment of inertia I₁ and I₂ as shown in the below figure, is gear driven such that the ratio of speed of shaft B to shaft A is 'G'. Neglecting the inertia of gears, the equivalent inertia of disc on shaft B at the speed of shaft A is equal to 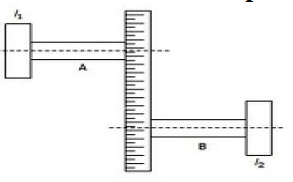
G.I₂
G².I₂
I₂/G
I₂/G²
For an involute gear, the ratio of base circle radius and pitch circle radius is equal to
sinφ
cosφ
secφ
cosecφ