
Limiting force of friction is the
Tangent of angle between normal reaction and the resultant of normal reaction and limiting friction
Ratio of limiting friction and normal reaction
The friction force acting when the body is just about to move
The friction force acting when the body is in motion
Correct Answer :
C. The friction force acting when the body is just about to move
Related Questions
A framed structure is perfect, if the number of members are __________ (2j - 3), where j is the number of joints.
Equal to
Less than
Greater than
None of these
The forces, which meet at one point and their lines of action also lie on the same plane, are known as
Coplanar concurrent forces
Coplanar non-concurrent forces
Non-coplanar concurrent forces
Non-coplanar non-concurrent forces
Moment of inertia of a circular section about an axis perpendicular to the section is
πd3/16
πd3/32
πd4/32
πd4/64
The total energy possessed by a system of moving bodies
Is constant at every instant
Varies from point to point
Is maximum in the start and minimum at the end
Is minimum in the start and maximum at the end
Which is the correct statement about law of polygon of forces?
If any number of forces acting at a point can be represented by the sides of a polygon taken in order, then the forces are in equilibrium
If any number of forces acting at a point can be represented in direction and magnitude by the sides of a polygon, then the forces are in equilibrium
If a polygon representing forces acting at a point is closed then forces are in equilibrium
If any number of forces acting at a point can be represented in direction and magnitude by the sides of a polygon taken in order, then the forces are in equilibrium
One joule means that
Work is done by a force of 1 N when it displaces a body through 1 m
Work is done by a force of 1 kg when it displaces a body through 1 m
Work is done by a force of 1 dyne when it displaces a body through 1 cm
Work is done by a force of 1 g when it displaces a body through 1 cm
If n = number of members and y = number of joints, then for a perfect frame, n = ?
1/2
2/3
3/2
2/4
When the spring of a watch is wound, it will possess
Strain energy
Kinetic energy
Heat energy
Electrical energy
Frictional force encountered after commencement of motion is called
Limiting friction
Kinematic friction
Frictional resistance
Dynamic friction
Which of the following statement is incorrect?
A force acting in the opposite direction to the motion of the body is called force of friction
The ratio of the limiting friction to the normal reaction is called coefficient of friction
A machine whose efficiency is 100% is known as an ideal machine
The velocity ratio of a machine is the ratio of load lifted to the effort applied
The centre of gravity of a trapezium with parallel sides a and b lies at a distance of y from the base b, as shown in the below figure. The value of y is 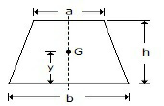
h [(2a + b)/(a + b)]
(h/2) [(2a + b)/(a + b)]
(h/3) [(2a + b)/(a + b)]
(h/3) [(a + b)/(2a + b)]
The motion of a particle round a fixed axis is
Translatory
Rotary
Circular
Translatory as well as rotary
If P is the force acting on the body, m is the mass of the body and a is the acceleration of the body, then according to Newton's second law of motion,
P + m.a = 0
P - m.a = 0
P × m.a = 0
P/m.a = 0
The Cartesian equation of trajectory is (where u = Velocity of projection, α = Angle of projection, and x, y = Co-ordinates of any point on the trajectory after t seconds.)
y = (gx²/2u² cos²α) + x. tanα
y = (gx²/2u² cos²α) - x. tanα
y = x. tanα - (gx²/2u² cos²α)
y = x. tanα + (gx²/2u² cos²α)
In a framed structure, as shown in the below figure, the forces in the members AB and BC are respectively 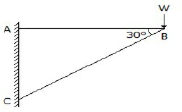
√3. W (tensile) and 2W (compressive)
2W (tensile) and √3. W (compressive)
2√3. W (tensile) and 2√3. W (compressive)
None of the above
Which of the following is the locus of a point that moves in such a manner that its distance from a fixed point is equal to its distance from a fixed line multiplied by a constant greater than one
Ellipse
Hyperbola
Parabola
Circle
Moment of inertia of a hollow circular section, as shown in the below figure about an axis perpendicular to the section, is __________ than that about X-X axis. 
Two times
Same
Half
None of these
The periodic time of a particle with simple harmonic motion is __________ proportional to the angular velocity.
Directly
Inversely
Square root
None of these
A framed structure is perfect if it contains members equal to
2n³
2n
n²
3n² Where n = number of joints in a frame
The maximum velocity of a particle moving with simple harmonic motion is
ω
ωr
ω2r
ω/r
Which of the following statement is correct?
The algebraic sum of the forces, constituting the couple is zero
The algebraic sum of the forces, constituting the couple, about any point is the same
A couple cannot be balanced by a single force but can be balanced only by a couple of opposite sense
All of the above
The point, through which the whole weight of the body acts, irrespective of its position, is known as
Moment of inertia
Centre of gravity
Centre of percussion
Centre of mass
When a body falls freely under gravitational force, it possesses __________ weight.
No
Minimum
Maximum
None of these
The velocity ratio of a single purchase crab winch can be increased by
Increasing the length of the handle
Increasing the radius of the load drum
Increasing the number of teeth of the pinion
All of the above
The periodic time (T) is given by (where, ω = Angular velocity of particle in rad/s.)
ω/2π
2π/ω
2π × ω
π/ω
An ideal machine is one whose efficiency is
Between 60 and 70 %
Between 70 and 80 %
Between 80 and 90 %
100 %
The linear acceleration (a) of a body rotating along a circular path of radius (r) with an angular acceleration of α rad/s2, is
a = α/ r
a = α.r
a = r / α
None of these
The force induced in the string AB due to the load W, as shown in the below figure is 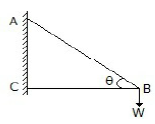
W sinθ
W cosθ
W secθ
W cosecθ
Which of the following are vector quantities?
Angular displacement
Angular velocity
Angular acceleration
All of these
The centre of percussion of the homogeneous rod of length L suspended at the top will be
L/2
L/3
3L/4
2L/3