
Rectangular bar in a rectangular hole is the following type of pair
Completely constrained motion
Partially constrained motion
Incompletely constrained motion
Freely constrained motion
Correct Answer :
A. Completely constrained motion
Related Questions
The type of pair formed by two elements which are so connected that one is constrained to turn or revolve about a fixed axis of another element is known as
Turning pair
Rolling pair
Sliding pair
Spherical pair
The frictional torque transmitted by a cone clutch is same as that of
Flat pivot bearing
Flat collar bearing
Conical pivot bearing
Truncated conical pivot bearing
A pulley and belt in a belt drive form a
Cylindrical pair
Turning pair
Rolling pair
Sliding pair
A Porter governor is a
Pendulum type governor
Dead weight governor
Spring loaded governor
Inertia governor
Oldham's coupling is the
Second inversion of double slider crank chain
Third inversion of double slider crank chain
Second inversion of single slider crank chain
Third inversion of slider crank chain
The Coriolis component of acceleration acts
Along the sliding surface
Perpendicular to the sliding surface
At 45° to the sliding surface
Parallel to the sliding surface
A point on a connecting link (excluding end points) of a double slider crank mechanism traces a
Straight line path
Hyperbolic path
Parabolic path
Elliptical path
A kinematic chain requires at least
2 links and 3 turning pairs
3 links and 4 turning pairs
4 links and 4 turning pairs
5 links and 4 turning pairs
The lower pair is a
Open pair
Closed pair
Sliding pair
Point contact pair
For simple harmonic motion of the of follower, a cosine curve represents
Displacement diagram
Velocity diagram
Acceleration diagram
All of the above
In the below figure, PC is the connecting rod and OC is the crank making an angle θ with the line of stroke PO and rotates with uniform angular velocity at ω rad/s. The Klien's acceleration diagram for determining the acceleration of the piston P is shown by quadrilateral CQNO, if N coincides with O, then 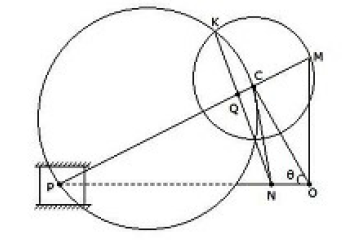
Acceleration and velocity of the piston P is zero
Acceleration and velocity of the piston P is maximum
Acceleration of the piston P is zero and its velocity is maximum
Acceleration of the piston P is maximum and its velocity is zero
When the axes of the first and last wheels are coaxial, then the train is known as
Simple train of wheels
Compound train of wheels
Reverted gear train
Epicyclic gear train
The example of higher pair is
Belt, rope and chain drives
Gears, cams
Ball and roller bearings
All of the above
The motion between a pair when limited to a definite direction, irrespective of the direction of force applied, is known as
Completely constrained motion
Incompletely constrained motion
Successfully constrained motion
None of these
When a body is subjected to transverse vibrations, the stress induced in a body will be
Shear stress
Bending stress
Tensile stress
Compressive stress
Two heavy rotating masses are connected by shafts of lengths l₁, l₂ and l₃ and the corresponding diameters are d₁, d₂ and d₃. This system is reduced to a torsionally equivalent system having uniform diameter d = d₁ of the shaft. The equivalent length of the shaft is
(l₁ + l₂ + l₃)/3
l = l₁ + l₂.(d₁/d₂)³ + l₂.(d₁/d₃)³
l = l₁ + l₂.(d₁/d₂)⁴ + l₃.(d₁/d₃)⁴
l₁ + l₂ + l₃
The maximum efficiency of spiral gears is (where θ = Shaft angle, and φ = Friction angle)
sin (θ + φ) + 1/ cos (θ - φ) + 1
cos (θ - φ) + 1/ sin (θ + φ) + 1
cos (θ + φ) + 1/ cos (θ - φ) + 1
cos (θ - φ) + 1/ cos (θ + φ) + 1
If the controlling force line for a spring controlled governor when produced intersects the Y-axis at the origin, then the governor is said to be
Stable
Unstable
Isochronous
None of these
A body will begin to move down an inclined plane, if the angle of inclination of the plane is ________ the angle of friction.
Equal to
Less than
Greater than
None of these
The frictional torque transmitted in a flat pivot bearing, considering uniform pressure, is (where μ = Coefficient of friction, W = Load over the bearing, and R = Radius of bearing surface)
(1/2) μ W R
(2/3) μ W R
(3/4) μ W R
μ W R
The velocity of the belt for maximum power is (where m = Mass of the belt in kg per metre length)
T/3
(T.g)/3
√(T/3m)
√(3m/T)
Angular acceleration of a link can be determined by dividing the
Centripetal component of acceleration with length of link
Tangential component of acceleration with length of link
Resultant acceleration with length of link
All of the above
The approximate straight line mechanism is a
Four bar linkage
6 bar linkage
8 bar linkage
3 bar linkage
The velocity of any point in mechanism relative to any other point on the mechanism on velocity polygon is represented by the line
Joining the corresponding points
Perpendicular to line as per (A)
Not possible to determine with these data
At 45° to line as per (A)
A spring controlled governor is found unstable. It can be made stable by
Increasing the spring stiffness
Decreasing the spring stiffness
Increasing the ball mass
Decreasing the ball mass
In S.H.M., acceleration is proportional to
Velocity
Displacement
Rate of change of velocity
All of the above
When the speed of the engine fluctuates continuously above and below the mean speed, the governor is said to be
Stable
Unstable
Isochronous
Hunt
The coriolis component of acceleration exists whenever a point moves along a path that has
Linear displacement
Rotational motion
Gravitational acceleration
Tangential acceleration
A governor is said to be stable, if the
Radius of rotation of balls increases as the equilibrium speed decreases
Radius of rotation of balls decreases as the equilibrium speed decreases
Radius of rotation of balls increases as the equilibrium speed increases
Radius of rotation of balls decreases as the equilibrium speed increases
A slider crank chain consists of following numbers of turning and sliding pairs
1, 3
2, 2
3, 1
4, 0