
The arrangement is called bevel gearing, when two __________ are connected by gears.
Intersecting and coplanar shafts
Nonintersecting and non-coplanar shafts
Parallel and coplanar shafts
Parallel and non-coplanar shafts
Correct Answer :
A. Intersecting and coplanar shafts
Related Questions
The secondary unbalanced force is __________ the primary unbalanced force.
One-half
Two-third
n times
1/n times
Transmission of power from the engine to the rear axle of an automobile is by means of
Compound gears
Worm and wheel method
Hooke's joint
Crown gear
Effort of a governor is the
Mean force exerted at the sleeve for a given percentage change of speed
Workdone at the sleeve for maximum equilibrium speed
Mean force exerted at the sleeve for maximum equilibrium speed
None of the above
In a differential band brake as shown in the below figure, the drum rotates anticlockwise and the greater tension T₁ acts at A and smaller tension T₂ at B. Length OA is greater than length OB. In order to apply the brake, the force P at C should 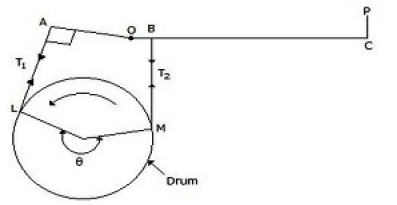
Be zero
Act in upward direction
Act in downward direction
None of the above
The type of coupling used to join two shafts whose axes are neither in same straight line nor parallel, but intersect is
Flexible coupling
Universal coupling
Chain coupling
Oldham's coupling
When two links are connected by a pin joint, their instantaneous centre lies
On their point of contact
At the centre of curvature
At the centre of circle
At the pin joint
In a mechanism, usually one link is fixed. If the fixed link is changed in a kinematic chain, then relative motion of other links
Will remain same
Will change
Could change or remain unaltered depending on which link is fixed
Will not occur
The frequency of oscillation of a torsional pendulum is
2πk/r. √(g/l)
r/2πk. √(l/g)
2πr/k. √(g/l)
r/2πk. √(g/l)
The motion of a shaft in a circular hole is an example of
Completely constrained motion
Incompletely constrained motion
Successfully constrained motion
None of these
Crowning on pulleys helps
In increasing velocity ratio
In decreasing the slip of the belt
For automatic adjustment of belt position so that belt runs centrally
Increase belt and pulley life
The pitching of a ship produces forces on the bearings which act __________ to the motion of the ship.
Vertically and parallel
Vertically and perpendicular
Horizontally and parallel
Horizontally and perpendicular
Which is the false statement about the properties of instantaneous centre?
At the instantaneous center of rotation, one rigid link rotates instantaneously relative to another for the configuration of mechanism considered
The two rigid links have no linear velocities relative to each other at the instantaneous centre
The two rigid links which have no linear velocity relative to each other at this center have the same linear velocity to the third rigid link
The double centre can be denoted either by O2 or O12, but proper selection should be made
The equation of motion for a vibrating system with viscous damping is (d²x/dt²) + (c/m).(dx/dt) + (s/m).x = 0, if the roots of the equation are __________ then the system will be under damped.
Equal
Real
Complex conjugate
None of these
Angular acceleration of a link can be determined by dividing the
Centripetal component of acceleration with length of link
Tangential component of acceleration with length of link
Resultant acceleration with length of link
All of the above
The periodic time is given by (where ω = Angular velocity of the particle in rad/s)
ω/2π
2π/ω
ω × 2π
π/ω
Ball and a Socket forms a
Turning pair
Rolling pair
Screw pair
Spherical pair
A machine mounted on a single coil spring has a period of free vibration of tp . If the spring is cut into four equal parts and placed in parallel and the machine is mounted on them, then the period of free vibration of the new system will become
tp /16
tp /4
4 tp
16 tp
One end of a helical spring is fixed while the other end carries the load W which moves with simple harmonic motion. The frequency of motion is given by (where δ = Deflection of the spring)
2π. √(g/δ)
1/2π. √(g/δ)
2π. √(δ/g)
1/2π. √(δ/g)
In a Hartnell governor, the compression of the spring is __________ the lift of the sleeve.
Equal to
Less than
Greater than
None of these
A friction circle is a circle drawn when a journal rotates in a bearing. Its radius depends upon the coefficient of friction and the
Magnitude of the forces on journal
Angular velocity of journal
Clearance between journal and bearing
Radius of journal
Balancing of rotating and reciprocating parts of an engine is necessary when it runs at
Slow speed
Moderate speed
Highs peed
Any one of these
A body is said to be under forced vibrations, when
There is a reduction in amplitude after every cycle of vibration
No external force acts on a body, after giving it an initial displacement
A body vibrates under the influence of external force
None of the above
When the nature of contact between the elements of a pair is such that one element can turn about the other by screw threads, the pair is known as a
Screw pair
Spherical pair
Turning pair
Sliding pair
Which of the following is a lower pair?
Ball and socket i
Piston and cylinder
Cam and follower
Both (A) and (B) above
The centre distance between two meshing involute gears is equal to
Sum of base circle radii/cosφ
Difference of base circle radii/ cosφ
Sum of pitch circle radii/ cosφ
Difference of pitch circle radii/ cosφ
In a gear having involute teeth, the normal to the involute is a tangent to the
Pitch circle
Base circle
Addendum circle
Dedendum circle
Rectilinear motion of piston is converted into rotary by
Cross head
Slider crank
Connecting rod
Gudgeon pin
The periodic time of a compound pendulum is __________ when the distance between the point of suspension and the centre of gravity is equal to the radius of gyration of the body about its centre of gravity.
Zero
Minimum
Maximum
None of these
The two links OA and OB are connected by a pin joint at O. If the link OA turns with angular velocity ω₁ rad/s in the clockwise direction and the link OB turns with angular velocity ω₂ rad/s in the clockwise direction, then the rubbing velocity at the pin joint O is (where r = Radius of the pin at O)
ω₁.ω₂.r
(ω₁ - ω₂)r
(ω₁ + ω₂)r
(ω₁ - ω₂)2r
Cam angle is defined as the angle
During which the follower returns to its initial position
Of rotation of the cam for a definite displacement of the follower
Through which, the cam rotates during the period in which the follower remains in the highest position
Moved by the cam from the instant the follower begins to rise, till it reaches its highest position