
The dedendum circle diameter is equal to (where, φ = Pressure angle)
Pitch circle dia. × cosφ
Addendum circle dia. × cosφ
Clearance circle dia. × cosφ
Pitch circle dia. × sinφ
Correct Answer :
A. Pitch circle dia. × cosφ
Related Questions
The natural frequency of free torsional vibrations of a shaft is equal to (where q = Torsional stiffness of the shaft, and I = Mass moment of inertia of the disc attached at the end of a shaft)
2π. √(q/I)
2π qI
(1/2π). √(q/I)
1/2π
The cam and follower is an example of
Sliding pair
Rolling pair
Lower pair
Higher pair
A body will begin to move down an inclined plane, if the angle of inclination of the plane is ________ the angle of friction.
Equal to
Less than
Greater than
None of these
An involute pinion and gear are in mesh. If both have the same size of addendum, then there will be an interference between the
Tip of the gear tooth and flank of pinion
Tip of the pinion and flank of gear
Flanks of both gear and pinion
Tip of both gear and pinion
Cam angle is defined as the angle
During which the follower returns to its initial position
Of rotation of the cam for a definite displacement of the follower
Through which, the cam rotates during the period in which the follower remains in the highest position
Moved by the cam from the instant the follower begins to rise, till it reaches its highest position
In a rigid link OA, velocity of A w.r.t. O will be
Parallel to OA
Perpendicular to OA
At 45° to OA
Along AO
According to Kennedy's theorem, if three bodies move relatively to each other, their instantaneous centres will lie on a
Straight line
Parabolic curve
Triangle
Rectangle
An exact straight line motion mechanism is a
Scott-Russell's mechanism
Hart's mechanism
Peaucellier's mechanism
All of these
Pitch point of a cam is
A point on the pitch curve having minimum pressure angle
A point on the pitch curve having maximum pressure angle
Any point on the pitch curve
Any point on the pitch circle
Oldhams coupling is an inversion of the kinematic chain used in
Whitworth quick return mechanism
Elliptical trammels
Rotary engine
Universal joint
The coefficient of fluctuation of speed is __________ of maximum fluctuation of speed and the mean speed.
Sum
Difference
Product
Ratio
Whitworth quick return mechanism is obtained by inversion of
Slider crank mechanism
Kinematic chain
Five link mechanism
Roller cam mechanism
When the two elements of a pair have __________ when in motion, it is said to a lower pair.
Line or point contact
Surface contact
Body contact
None of these
In a flat collar pivot bearing, the moment due to friction is proportional to
(r₁² - r₂²)/(r₁ - r₂)
(r₁² - r₂²)/(r₁ + r₂)
(r₁³ - r₂³)/(r₁² - r₂²)
(r₁³ - r₂³)/(r₁ - r₂)
Klein's construction is useful to determine
Velocity of various parts
Acceleration of various parts
Displacement of various parts
Angular acceleration of various parts
The balancing of a rigid rotor can be achieved by appropriately placing balancing masses in
A single plane
Two planes
Three planes
Four planes
The essential condition of placing the two masses, so that the system becomes dynamically equivalent, is (where l₁ and l₂ = Distance of two masses from the centre of gravity of the body, and kG = Radius of gyration of the body)
l₁ = kG
l₂ = kG
l₁l₂ = kG
l₁l₂ = kG²
The Klein's diagram is useful to find
Displacement of various parts
Velocity of various parts
Acceleration of various parts
Angular acceleration of various parts
Kinematic pairs are those which have
Two elements held together mechanically
Two elements having relative motion
Two elements having Coriolis component
Minimum of two instantaneous centres
In automobiles the power is transmitted from gear box to differential through
Bevel gear
Universal joint
Hooke's joint
Knuckle joint
Transmission angle is the angle between
Input link and coupler
Input link and fixed link
Output link and coupler
Output link and fixed link
The sense of Coriolis component is such that it
Leads the sliding velocity vector by 90°
Lags the sliding velocity vector by 90°
Is along the sliding velocity vector
Leads the sliding velocity vector by 180°
The relation between number of links (l) and number of joints (j) in a kinematic chain is
l = (1/2).(j + 2)
l = (2/3).(j + 2)
l = (3/4).(j + 3)
l = j + 4
ABCD is a four bar mechanism in which AB = 310 mm and CD = 450 mm. AB and CD are both perpendicular to the fixed link AD, as shown in the below figure. If the velocity of B at this condition is v. Then the velocity of C is 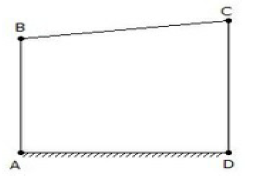
v
(2/3). v
(3/2). v
(9/4). v
The motion between a pair when limited to a definite direction, irrespective of the direction of force applied, is known as
Completely constrained motion
Incompletely constrained motion
Successfully constrained motion
None of these
In a multiple V-belt drive, when a single belt is damaged, it is preferable to change the complete set to
Reduce vibration
Reduce slip
Ensure uniform loading
Ensure proper alignment
In Meyer's expansion valve, the main valve is driven by an eccentric having an angle of advance from
10°-15°
15°-25°
25°-30°
30°-40°
Transmission of power from the engine to the rear axle of an automobile is by means of
Compound gears
Worm and wheel method
Hooke's joint
Crown gear
If some links are connected such that motion between them can take place in more than one direction, it is called
Incompletely constrained motion
Partially constrained motion
Completely constrained motion
Successfully constrained motion
In S.H.M., the velocity vector w.r.t. displacement vector
Leads by 90°
Lags by 90°
Leads by 180°
Are in phase