
The instantaneous centres which vary with the configuration of mechanism are called
Permanent instantaneous centres
Fixed instantaneous centres
Neither fixed nor permanent instantaneous centres
None of the above
Correct Answer :
C. Neither fixed nor permanent instantaneous centres
Related Questions
The unbalanced force due to reciprocating masses
Varies in magnitude but constant in direction
Varies in direction but constant in magnitude
Varies in magnitude and direction both
Constant in magnitude and direction both
In order to double the period of a simple pendulum, the length of the string should be
Halved
Doubled
Quadrupled
None of these
The ratio of the driving tensions for V-belts is __________ times that of flat belts. (Where β = Semi-angle of the groove)
sinβ
cosβ
cosecβ
secβ
Coriolis component acts
Perpendicular to sliding surfaces
Along sliding surfaces
Somewhere in between above two
None of the above
A Hartnell governor is a
Dead weight governor
Pendulum type governor
Spring loaded governor
Inertia governor
The frictional torque transmitted in a flat pivot bearing, assuming uniform wear, is (Where μ = Coefficient of friction, W=Load over the bearing, R=Radius of bearing)
μwr
¾μWR
(2/3) μWR
½μWR
The efficiency of a screw jack is maximum, when (where α = Helix angle, and φ = Angle of friction)
α = 45° + φ/2
α = 45° - φ/2
α = 90° + φ
α = 90° - φ
The maximum or minimum value of the swaying couple is
± c.m.ω².r
± a (1 - c) m.ω².r
± (a/√2) (1 - c) m.ω².r
± 2a (1 - c) m.ω².r
In a four stroke I.C. engine, the turning moment during the compression stroke is
Positive throughout
Negative throughout
Positive during major portion of the stroke
Negative during major portion of the stroke
The gears are termed as medium velocity gears, if their peripheral velocity is
1-3 m/s
3-15 m/s
15-30 m/s
30-50 m/s
Which of the following is a pendulum type governor?
Watt governor
Porter governor
Hartnell governor
None of these
For a twin cylinder V-engine, the crank positions for primary reverse cranks and secondary direct cranks are shown in the below figure. The engine is a 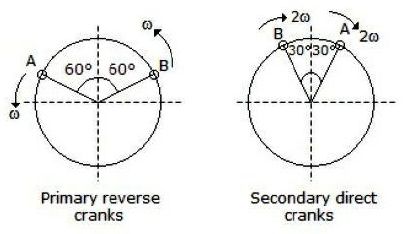
30° V-engine
60° V-engine
120° V-engine
150° V-engine
Which of the following statements regarding laws governing the friction between dry surfaces are correct?
The friction force is dependent on the materials of the contact surfaces.
The friction force is directly proportional to the normal force.
The friction force is independent of me area of contact.
All of the above
The engine of an aeroplane rotates in clockwise direction when seen from the tail end and the aeroplane takes a turn to the left. The effect of gyroscopic couple on the aeroplane will be
To dip the nose and tail
To raise the nose and tail
To raise the nose and dip the tail
To dip the nose and raise the tail
Which of the following statement is correct?
The power absorbed in operating the piston valve is less than D-slide valve
The wear of the piston valve is less than the wear of the D-slide valve
The D-slide valve is also called outside admission valve.
All of the above
When a point moves along a straight line, its acceleration will have
Radial component only
Tangential component only
Coriolis component only
Radial and tangential components both
In a system subjected to damped forced vibrations, the ratio of maximum displacement to the static deflection is known as
Critical damping ratio
Damping factor
Logarithmic decrement
Magnification factor
A pantograph is a mechanism with
Lower pairs
Higher pairs
Rolling pairs
Turning pairs
The partial balancing means
Balancing partially revolving masses
Balancing partially reciprocating masses
Best balancing of engines
All of these
When the nature of contact between the elements of a pair is such that one element can turn about the other by screw threads, the pair is known as a
Screw pair
Spherical pair
Turning pair
Sliding pair
In a differential band brake as shown in the below figure, the drum rotates anticlockwise and the greater tension T₁ acts at A and smaller tension T₂ at B. Length OA is greater than length OB. In order to apply the brake, the force P at C should 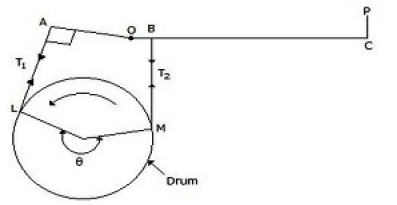
Be zero
Act in upward direction
Act in downward direction
None of the above
Which of the following is an inversion of Single slider crank chain?
Beam engine
Rotary engine
Oldhams coupling
Elliptical trammel
A spring controlled governor is said to be unstable when the controlling force
Increases as the radius of rotation decreases
Increases as the radius of rotation increases
Decreases as the radius of rotation increases
Remains constant for all radii of rotation
The maximum fluctuation of speed is the
Difference of minimum fluctuation of speed and the mean speed
Difference of the maximum and minimum speeds
Sum of maximum and minimum speeds
Variations of speed above and below the mean resisting torque line
A shaft carrying three rotors will have
No node
One node
Two nodes
Three nodes
In which of the following type of gear train the first gear and the last gear are co-axial.
Simple gear train
Compound gear train
Reverted gear train
None of the above
In a radial cam, the follower moves
In a direction perpendicular to the cam axis
In a direction parallel to the cam axis
In any direction irrespective of the cam axis
Along the cam axis
The maximum efficiency of a screw jack is
(1 - sinφ)/(1 + sinφ)
(1 + sinφ)/(1 - sinφ)
(1 - tanφ)/(1 + tanφ)
(1 + tanφ)/(1 - tanφ)
When a slider moves on a fixed link having curved surface, their instantaneous centre lies
On their point of contact
At the centre of curvature
At the centre of circle
At the pin joint
In the below figure, PC is the connecting rod and OC is the crank making an angle θ with the line of stroke PO and rotates with uniform angular velocity at ω rad/s. The Klien's acceleration diagram for determining the acceleration of the piston P is shown by quadrilateral CQNO, if N coincides with O, then 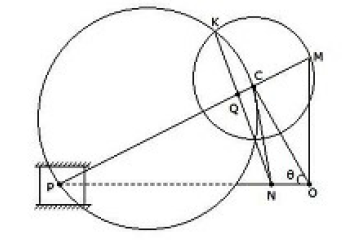
Acceleration and velocity of the piston P is zero
Acceleration and velocity of the piston P is maximum
Acceleration of the piston P is zero and its velocity is maximum
Acceleration of the piston P is maximum and its velocity is zero