
The radial distance from the top of a tooth to the bottom of a tooth in a meshing gear, is called
Dedendum
Addendum
Clearance
Working depth
Correct Answer :
C. Clearance
Related Questions
When the crank is at the inner dead centre, in a reciprocating steam engine, then the velocity of the piston will be
Minimum
Zero
Maximum
None of these
In order to balance the reciprocating masses,
Primary forces and couples must be balanced
Secondary forces and couples must be balanced
Both (A) and (B)
None of these
In Meyer's expansion valve, the main valve is driven by an eccentric having an angle of advance from
10°-15°
15°-25°
25°-30°
30°-40°
A foot step bearing and rotor of a vertical turbine form examples of
Incompletely constrained motion
Partially constrained motion
Completely constrained motion
Successfully constrained motion
Ball and a Socket forms a
Turning pair
Rolling pair
Screw pair
Spherical pair
The motion between a pair when limited to a definite direction, irrespective of the direction of force applied, is known as
Completely constrained motion
Incompletely constrained motion
Successfully constrained motion
None of these
Power of a governor is the
Mean force exerted at the sleeve for a given percentage change of speed
Workdone at the sleeve for maximum equilibrium speed
Mean force exerted at the sleeve for maximum equilibrium speed
None of the above
The natural frequency of free longitudinal vibrations is equal to (where m = Mass of the body, s = Stiffness of the body, and δ = Static deflection of the body)
1/2π × √(s/m)
1/2π × √(g/δ)
0.4985/√δ
Any one of these
If the rotating mass of a rim type flywheel is distributed on another rim type flywheel whose mean radius is half the mean radius of the former, then energy stored in the latter at the same speed will be
Four times the first one
Same as the first one
One fourth of the first one
One and a half times the first one
When the axes of the first and last wheels are coaxial, then the train is known as
Simple train of wheels
Compound train of wheels
Reverted gear train
Epicyclic gear train
The primary unbalanced force is maximum _________ in one revolution of the crank.
Twice
Four times
Eight times
Sixteen times
In a gear having involute teeth, the normal to the involute is a tangent to the
Pitch circle
Base circle
Addendum circle
Dedendum circle
In a system subjected to damped forced vibrations, the ratio of maximum displacement to the static deflection is known as
Critical damping ratio
Damping factor
Logarithmic decrement
Magnification factor
For two governors A and B, the lift of sleeve of governor A is more than that of governor B, for a given fractional change in speed. It indicates that
Governor A is more sensitive than governor B
Governor B is more sensitive than governor A
Both governors A and B are equally sensitive
None of the above
In an open pair, the two elements of a pair
Have a surface contact when in motion
Have a line or point contact when in motion
Are kept in contact by the action of external forces, when in motion
Are not held together mechanically
The relation between number of pairs (p) forming a kinematic chain and the number of links (l) is
l = 2p - 2
l = 2p - 3
l = 2p - 4
l = 2p - 5
The power from the engine to the rear axle of an automobile is transmitted by means of
Worm and worm wheel
Spur gears
Bevel gears
Hooke's joint
A shaft carrying two rotors at its ends will have
No node
One node
Two nodes
Three nodes
The pressure angle of a cam depends upon
Offset between centre lines of cam and follower
Lift of follower
Angle of ascent
All of the above
A slider crank chain consists of following numbers of turning and sliding pairs
1, 3
2, 2
3, 1
4, 0
The frequency of damped vibrations with viscous damping is ________ the frequency of undamped vibrations.
More than
Less than
Same as
None of these
A point on a link connecting double slider crank chain traces a
Ellipse
Circle
Parabola
Hyperbola
The unbalanced primary forces in a reciprocating engine are
Balanced completely
Balanced partially
Balanced by secondary forces
Not balanced
A spring controlled governor is said to be unstable when the controlling force
Increases as the radius of rotation decreases
Increases as the radius of rotation increases
Decreases as the radius of rotation increases
Remains constant for all radii of rotation
In a screw jack, the effort required to lower the load W is given by
P = W tan(α - φ)
P = W tan(α + φ)
P = W tan(φ - α)
P = W cos(α + φ)
V-belts are usually used for
Long drives
Short drives
Long and short drives
None of these
Typewriter constitutes
Machine
Structure
Mechanism
Inversion
For the brake to be self locking, the force P at C shown in the below figure, should 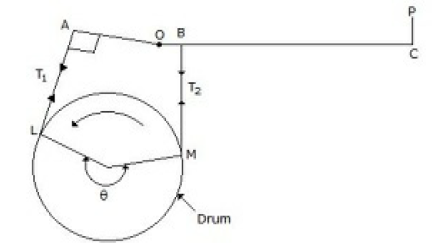
Be zero
Act in upward direction
Act in downward direction
None of these
Transmission angle is the angle between
Input link and coupler
Input link and fixed link
Output link and coupler
Output link and fixed link
Pulley in a belt drive acts as
Cylindrical pair
Turning pair
Rolling pair
Sliding pair