
The velocity of the rubbing surface __________ with the distance from the axis of the bearing.
Increases
Decreases
Remain same
None of these
Correct Answer :
A. Increases
Related Questions
The two parallel and coplanar shafts are connected by gears having teeth parallel to the axis of the shaft. This arrangement is known as
Spur gearing
Helical gearing
Bevel gearing
Spiral gearing
If D₁ and D₂ be the diameters of driver and driven pulleys, then belt speed is proportional to
D₁/D₂
D₂/D₁
D₁.D₂
D₁
In a cone pulley, if the sum of radii of the pulleys on the driving and driven shafts is Constant, then
Open belt drive is recommended
Crossed belt drive is recommended
Both open belt drive and crossed belt drive is recommended
The drive is recommended depending upon the torque transmitted
In Meyer's expansion valve, the main valve is driven by an eccentric having an angle of advance from
10°-15°
15°-25°
25°-30°
30°-40°
For a twin cylinder V-engine, the crank positions for primary reverse cranks and secondary direct cranks are shown in the below figure. The engine is a 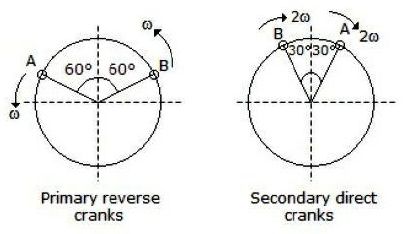
30° V-engine
60° V-engine
120° V-engine
150° V-engine
The radial distance from the top of a tooth to the bottom of a tooth in a meshing gear, is called
Dedendum
Addendum
Clearance
Working depth
A kinematic chain is known as a mechanism when
None of the links is fixed
One of the links is fixed
Two of the links are fixed
None of these
When a mass of a critically damped single degree of freedom system is deflected from its equilibrium position and released, then it will
Return to equilibrium position without oscillation
Oscillate with increasing time period
Oscillate with decreasing amplitude
Oscillate with constant amplitude
Module of a gear is
D/T
T/D
2D/T
2T/D
A rotary internal combustion engine has __________ cylinders.
Four
Five
Six
Seven
Which of the following statement is correct for gears?
The addendum is less than the dedendum
The pitch circle diameter is the product of module and number of teeth
The contact ratio means the number of pairs of teeth in contact
All of the above
A spring controlled governor is said to be isochronous when the controlling force
Increases as the radius of rotation decreases
Increases as the radius of rotation increases
Decreases as the radius of rotation increases
Remain constant for all radii of rotation
Which of the following is a higher pair?
Turning pair
Screw pair
Belt and pulley
None of the above
Sensitiveness of the governor is defined as the ratio of the
Mean speed to the maximum equilibrium speed
Mean speed to the minimum equilibrium speed
Difference of the maximum and minimum equilibrium speeds to the mean speed
Sum of the maximum and minimum equilibrium speeds to the mean speed
The Grubler's criterion for determining the degrees of freedom (n) of a mechanism having plane motion is (where l = Number of links, and j = Number of binary joints)
n = (l -1) - j
n = 2(l - 1) - 2j
n = 3(l - 1) - 2j
n = 4(l - 1) - 3j
In a band and block brake, the ratio of tensions on tight side and slack side of the band is (where μ = Coefficient of friction between the blocks and the drum, θ = Semi-angle of each block subtending at the centre of drum, and n = Number of blocks)
T₁/T₂ = μ. θ. n
T₁/T₂ = [(1 - μ tanθ)/(1 + μ tanθ)]n
T₁/T₂ = (μ θ)n
T₁/T₂ = [(1 + μ tanθ)/(1 - μ tanθ)]n
Hart mechanism has
Eight links
Six links
Four links
Twelve links
Which of the following is an open pair?
Journal bearing
Ball and Socket joint
Leave screw and nut
None of the above
In the below figure, PC is the connecting rod and OC is the crank making an angle θ with the line of stroke PO and rotates with uniform angular velocity at ω rad/s. The Klien's acceleration diagram for determining the acceleration of the piston P is shown by quadrilateral CQNO, if N coincides with O, then 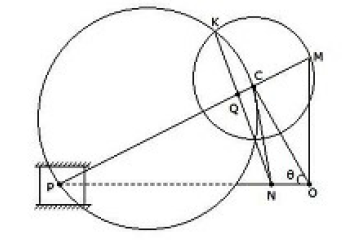
Acceleration and velocity of the piston P is zero
Acceleration and velocity of the piston P is maximum
Acceleration of the piston P is zero and its velocity is maximum
Acceleration of the piston P is maximum and its velocity is zero
The motion between a pair when limited to a definite direction, irrespective of the direction of force applied, is known as
Completely constrained motion
Incompletely constrained motion
Successfully constrained motion
None of these
In a cam drive with uniform velocity follower, the sharp corners of the displacement diagram are rounded off at the beginning and at the end of each stroke. This is done
Because of difficulty in manufacturing cam profile
Because of loose contact of follower with cam surface
In order to have acceleration in beginning and retardation at the end of stroke within the finite limits
Because the uniform velocity motion is a partial parabolic motion
Angle of ascent of cam is defined as the angle
During which the follower returns to its initial position
Of rotation of the cam for a definite displacement of the follower
Through which the cam rotates during the period in which the follower remains in highest position
Moved by the cam from the instant the follower begins to rise, till it reaches its highest position
Kinematic pairs are those which have
Two elements held together mechanically
Two elements having relative motion
Two elements having Coriolis component
Minimum of two instantaneous centres
In gramophones for adjusting the speed of the turntable, the following type of governor is commonly employed
Hartung governor
Wilson Hartnell governor
Pickering governor
Inertia governor
The velocity of sliding __________ the distance of the point of contact from the pitch point.
Is directly proportional to
Is inversely proportional to
Is equal to cos φ multiplied by
Does not depend upon
Power of a governor is the
Mean force exerted at the sleeve for a given percentage change of speed
Workdone at the sleeve for maximum equilibrium speed
Mean force exerted at the sleeve for maximum equilibrium speed
None of the above
Maximum fluctuation of energy in a flywheel is equal to [where I = Mass moment of inertia of the flywheel, E = Maximum fluctuation of energy, CS = Coefficient of fluctuation of speed, and ω = Mean angular speed = (ω₁ + ω₂)/2]
I.ω.(ω₁ - ω₂)
I.ω².CS
2.E.CS
All of these
The velocity of piston in a reciprocating steam engine is given by (where ω = Angular velocity of crank, r = Radius of crank pin circle, θ = Angle turned by crank from inner dead centre, and n = Ratio of length of connecting rod to the radius of crank)
ωr [sin θ + (sin 2θ/n)]
ωr [cos θ + (cos 2θ/n)]
ω²r [sin θ + (sin 2θ/n)]
ω²r [cos θ + (cos 2θ/n)]
TJIE horse power transmitted by a belt is dependent upon
Tension on tight side of belt
Tension on slack side of belt
Radius of pulley
All of the above
A motor car moving at a certain speed takes a left turn in a curved path. If the engine rotates in the same direction as that of wheels, men due to centrifugal forc
The reaction on me inner wheels increases and on the outer wheels decreases
The reaction on the outer wheels increases and on the inner wheels decreases
The reaction on the front wheels increases and on the rear wheels decreases
The reaction on the rear wheels increases and on the front wheels decreases