
The working depth of a gear is the radial distance from the
Pitch circle to the bottom of a tooth
Pitch circle to the top of a tooth
Top of a tooth to the bottom of a tooth
Addendum circle to the clearance circle
Correct Answer :
D. Addendum circle to the clearance circle
Related Questions
The stress induced in a body will be shear stress, when it is subjected to
Longitudinal vibrations
Transverse vibrations
Torsional vibrations
None of these
A shaft carrying two rotors at its ends will have
No node
One node
Two nodes
Three nodes
In a hydrodynamic journal bearing, there is
A very thin film of lubricant between the journal and the bearing such that there is contact between the journal and the bearing
A thick film of lubricant between the journal and the bearing
No lubricant between the journal and the bearing
A forced lubricant between the journal and the bearing
The product of the diametral pitch and circular pitch is equal to
1
1/π
π
2 π
Any point on a link connecting double slider crank chain will trace a
Straight line
Circle
Ellipse
Parabola
The ratio of maximum fluctuation of energy to the workdone per cycle is called
Fluctuation of energy
Maximum fluctuation of energy
Coefficient of fluctuation of energy
None of these
The frictional torque transmitted in a flat pivot bearing, considering uniform wear, is (where μ = Coefficient of friction, W = Load over the bearing, and R = Radius of bearing surface)
(1/2) μ W R
(2/3) μ W R
(3/4) μ W R
μ W R
Which of the following statement is correct as regard to the difference between a machine and a structure?
The parts of a machine move relative to one another, whereas the members of a structure do not move relative to one another
The links of a machine may transmit both power and motion, whereas the members of a structure transmit forces only
A machine transforms the available energy into some useful work, whereas in a structure no energy is transformed into useful work
All of the above
In a screw jack, the effort required to lift the load W is given by (where α = Helix angle, and φ = Angle of friction)
P = W tan(α - φ)
P = W tan(α + φ)
P = W tan(φ - α)
P = W cos(α + φ)
The acceleration of a flat-faced follower when it has contact with the flank of a circular arc cam, is given by
ω² R cosθ
ω² (R - r₁) cosθ
ω² (R - r₁) sinθ
ω² r₁ sinθ
The indicator using Watt mechanism is known as
Thompson indicator
Richard indicator
Simplex indicator
Thomson indicator
The frictional torque transmitted in a flat collar bearing, considering uniform pressure, is (where r₁ and r₂ = External and internal radii of collar respectively)
(1/2). μ W (r₁ + r₂)
(2/3). μ W (r₁ + r₂)
(1/2). μ W [(r₁³ - r₂³)/(r₁² - r₂²)]
(2/3). μ W [(r₁³ - r₂³)/(r₁² - r₂²)]
A higher pair has__________.
Point contact
Surface contact
No contact
None of the above
Which of the following is an inversion of Single slider crank chain?
Beam engine
Rotary engine
Oldhams coupling
Elliptical trammel
In a Hartnell governor, if a spring of greater stiffness is used, then the governor will be
Less sensitive
More sensitive
Unaffected of sensitivity
Isochronous
The method of obtaining different mechanisms by fixing in turn different links in a kinematic chain, is known as
Structure
Machine
Inversion
Compound mechanism
In a screw jack, the effort required to lower the load W is given by
P = W tan(α - φ)
P = W tan(α + φ)
P = W tan(φ - α)
P = W cos(α + φ)
The cam and follower is an example of
Sliding pair
Rolling pair
Lower pair
Higher pair
A pulley and belt in a belt drive form a
Cylindrical pair
Turning pair
Rolling pair
Sliding pair
The C.G. of a link in any mechanism would experience
No acceleration
Linear acceleration
Angular acceleration
Both angular and linear accelerations
A rigid body, under the action of external forces, can be replaced by two masses placed at a fixed distance apart. The two masses form an equivalent dynamical system, if
The sum of the two masses is equal to the total mass of body
The centre of gravity of the two masses coincides with that of the body
The sum of mass moment of inertia of the masses about their centre of gravity is equal to the mass moment of inertia of the body
All of the above
The two parallel and coplanar shafts are connected by gears having teeth parallel to the axis of the shaft. This arrangement is known as
Spur gearing
Helical gearing
Bevel gearing
Spiral gearing
The unbalanced force due to revolving masses
Varies in magnitude but constant in direction
Varies in direction but constant in magnitude
Varies in magnitude and direction both
Constant in magnitude and direction both
For the brake to be self locking, the force P at C shown in the below figure, should 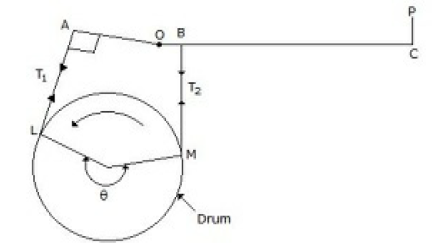
Be zero
Act in upward direction
Act in downward direction
None of these
The lower pair is a
Open pair
Closed pair
Sliding pair
Point contact pair
A mechanism consisting of four links is called a __________ mechanism.
Simple
Compound
Binary
None of these
The Klein's diagram is useful to find
Displacement of various parts
Velocity of various parts
Acceleration of various parts
Angular acceleration of various parts
The motion between a pair which takes place in __________ is known as incompletely constrained motion.
One direction only
Two directions only
More than one direction
None of these
If the rotating mass of a rim type flywheel is distributed on another rim type flywheel whose mean radius is half the mean radius of the former, then energy stored in the latter at the same speed will be
Four times the first one
Same as the first one
One fourth of the first one
One and a half times the first one
The frictional torque transmitted in a conical pivot bearing, considering uniform wear, is
(1/2) μ W R cosec α
(2/3) μ W R cosec α
(3/4) μ W R cosec α
μ W R cosec α