
To connect two parallel and coplanar shafts the following type of gearing is used
Spur gear
Bevel gear
Spiral gear
None of the above
Correct Answer :
A. Spur gear
Related Questions
Two systems shall be dynamically equivalent when
The mass of two are same
C.G. of two coincides
M.I. of two about an axis through e.g. is equal
All of the above
In a Hartnell governor, the stiffness of the spring is given by (where S1 and S2 = Spring forces exerted on the sleeve at max. and min. radii of rotation, and h = Compression of the spring)
(S₁ + S₂)/h
(S₁ - S₂)/h
(S₁ + S₂)/2h
(S₁ - S₂)/2h
The ratio of the driving tensions for V-belts is __________ times that of flat belts. (Where β = Semi-angle of the groove)
sinβ
cosβ
cosecβ
secβ
In the two rotor system as shown in the below figure (I₁ < I₂), a node of vibration is situated 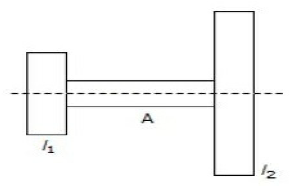
Between I₁, and I₂ but nearer I₁
Between I₁, and I₂ but nearer to I₂
Exactly in the middle of the shaft
Nearer to I₁ but outside
The main disadvantage of the sliding pair is that it is
Bulky
Wears rapidly
Difficult to manufacture
Both (A) and (B) above
Which of the following statement is correct?
The primary unbalanced force is less than the secondary unbalanced force.
The primary unbalanced force is maximum twice in one revolution of the crank.
The unbalanced force due to reciprocating masses varies in magnitude and direction both.
The magnitude of swaying couple in locomotives is inversely proportional to the distance between the two cylinder centre lines
When one of the links of a kinematic chain is fixed, the chain is known as a
Structure
Mechanism
Inversion
Machine
The pitching of a ship produces forces on the bearings which act __________ to the motion of the ship.
Vertically and parallel
Vertically and perpendicular
Horizontally and parallel
Horizontally and perpendicular
Peaucelliers mechanism has
Eight links
Six links
Four links
Twelve links
When a body moves with simple harmonic motion, the product of its periodic time and frequency is equal to
Zero
One
π/2
π
The two elements of a pair are said to form a _________ when they permit relative motion between them.
Open pair
Kinematic pair
Sliding pair
None of these
The frictional torque transmitted in a flat collar bearing, considering uniform pressure, is (where r₁ and r₂ = External and internal radii of collar respectively)
(1/2). μ W (r₁ + r₂)
(2/3). μ W (r₁ + r₂)
(1/2). μ W [(r₁³ - r₂³)/(r₁² - r₂²)]
(2/3). μ W [(r₁³ - r₂³)/(r₁² - r₂²)]
Typewriter constitutes
Machine
Structure
Mechanism
Inversion
The sensitiveness of the governor __________ as the speed range decreases.
Remains unaffected
Decreases
Increases
None of these
Which of the following is a turning pair?
Piston and cylinder of a reciprocating steam engine
Shaft with collars at both ends fitted into a circular hole
Lead screw of a lathe with nut
Ball and a socket joint
The secondary unbalanced force due to inertia of reciprocating parts in a reciprocating engine is given by (where m = Mass of reciprocating parts, ω = Angular speed of crank, r = Radius of crank, θ = Angle of inclination of crank with the line of stroke, and n = Ratio of the length of connecting rod to radius of crank)
m.ω².r sinθ
m.ω².r cosθ
m.ω².r (sin 2θ/n)
m.ω².r (cos 2θ/n)
In a screw jack, the effort required to lower the load W is given by
P = W tan(α - φ)
P = W tan(α + φ)
P = W tan(φ - α)
P = W cos(α + φ)
The Ackerman steering gear mechanism is preferred to the Davis steering gear mechanism, because
Whole of the mechanism in the Ackerman steering gear is on the back of the front wheels
The Ackerman steering gear consists of turning pairs
The Ackerman steering gear is most economical
Both (A) and (B)
When two links are connected by a pin joint, their instantaneous centre lies
On their point of contact
At the centre of curvature
At the centre of circle
At the pin joint
Which of the following property of the instantaneous centre is correct?
A rigid link rotates instantaneously relative to another link at the instantaneous centre for the configuration of the mechanism considered.
The two rigid links have no linear velocity relative to each other at the instantaneous centre.
The velocity of the instantaneous centre relative to any third rigid link is same whether the instantaneous centre is regarded as a point on the first rigid link or on the second rigid link.
All of the above
The radial distance of a tooth from the pitch circle to the bottom of the tooth is called
Dedendum
Addendum
Clearance
Working depth
A shaft has two heavy rotors mounted on it. The transverse natural frequencies, considering each of the rotor separately, are 100 Hz and 200 Hz respectively. The lowest critical speed is
5,367 r.p.m.
6,000 r.p.m.
9,360 r.p.m.
12,000 r.p.m.
Kinematic pairs are those which have
Point or line contact between the two elements when in motion
Surface contact between the two elements when in motion
Elements of pairs not held together mechanically
Two elements that permit relative motion
The maximum fluctuation of speed is the
Difference of minimum fluctuation of speed and the mean speed
Difference of the maximum and minimum speeds
Sum of maximum and minimum speeds
Variations of speed above and below the mean resisting torque line
The cam follower generally used in aircraft engines is
Knife edge follower
Flat faced follower
Spherical faced follower
Roller follower
The displacement of a flat faced follower when it has contact with the flank of a circular arc cam, is given by (where R = Radius of flank, r₁ = Minimum radius of the cam, and θ = Angle turned through by the cam)
R (1 - cosθ)
(R - r₁) (1 - cosθ)
R (1 - sinθ)
(R - r₁) (1 - sinθ)
The product of the diametral pitch and circular pitch is equal to
1
1/π
π
2 π
A pantograph is a mechanism with
Lower pairs
Higher pairs
Rolling pairs
Turning pairs
Which of the following statement is correct as regard to the difference between a machine and a structure?
The parts of a machine move relative to one another, whereas the members of a structure do not move relative to one another
The links of a machine may transmit both power and motion, whereas the members of a structure transmit forces only
A machine transforms the available energy into some useful work, whereas in a structure no energy is transformed into useful work
All of the above
In a kinematic chain, a quaternary joint is equivalent to
One binary joint
Two binary joints
Three binary joints
Four binary joints