
When a shaking force is transmitted through the springs, damping becomes detrimental when the ratio of its frequency to the natural frequency is greater than
0.25
0.5
1
2
Correct Answer :
D. 2
Related Questions
A disc is a spinning with an angular velocity ω rad/s about the axis of spin. The couple applied to the disc causing precession will be (where I = Mass moment of inertia of the disc, and ωP = Angular velocity of precession of the axis of spin)
(1/2).Iω²
Iω²
(1/2). I ω ωP
I ω ωP
When the sleeve of a Porter governor moves downwards, the governor speed
Increases
Decreases
Remain unaffected
First increases and then decreases
There are six gears A, B, C, D, E and F in a compound train. The numbers of teeth in the gears are 20, 60, 30, 80, 25 and 75 respectively. The ratio of angular speeds of the driven (F) to the driver (A) of the drive is
1/24
1/8
4/15
12
The Ackermann steering mechanism is preferred to the Davis type in automobiles because
The former is mathematically accurate
The former is having turning pair
The former is most economical
The former is most rigid
The critical speed of a shaft depends upon its
Mass
Stiffness
Mass and stiffness
Stiffness and eccentricity
In a Hartnell governor, the lift of the sleeve is given by (where r₁ and r₂ = Max. and min. radii of rotation, x = Length of ball arm of the lever, and y = Length of sleeve arm of the lever)
(r₁ + r₂) (y/x)
(r₁ + r₂) (x/y)
(r₁ - r₂) (y/x)
(r₁ - r₂) (x/y)
The magnitude of linear velocity of a point B on a link AB relative to point A is (Where ω = Angular velocity of the link AB)
ω × AB
ω × (AB)²
ω² × AB
(ω × AB)²
In a four-bar chain it is required to give an oscillatory motion to the follower for a continuous rotation of the crank. For the lengths of 50 mm of crank and 70 mm of the follower, determine theoretical maximum length of coupler. The distance between fixed pivots of crank and followers is
95 mm
Slightly less than 95 mm
Slightly more than 95 mm
45 mm
The rotating shafts tend to vibrate violently at whirling speeds because
The system is unbalanced
Bearing centre line coincides with the axis
The shafts are rotating at very high speeds
Resonance is caused due to the heavy mass of the rotor
Which of the following is a spring controlled governor?
Hartnell governor
Hartung governor
Wilson-Hartnell governor
All of these
In automobiles the power is transmitted from gear box to differential through
Bevel gear
Universal joint
Hooke's joint
Knuckle joint
Which of the following governor is used to drive a gramophone?
Watt governor
Porter governor
Pickering governor
Hartnell governor
In steady state forced vibrations, the amplitude of vibrations at resonance is __________ damping coefficient.
Equal to
Directly proportional to
Inversely proportional to
Independent of
The component of the acceleration, parallel to the velocity of the particle, at the given instant is called
Radial component
Tangential component
Coriolis component
None of these
The secondary unbalanced force is maximum __________ in one revolution of the crank.
Two times
Four times
Eight times
Sixteen times
In a four stroke I.C. engine, the turning moment during the compression stroke is
Positive throughout
Negative throughout
Positive during major portion of the stroke
Negative during major portion of the stroke
When the speed of the engine fluctuates continuously above and below the mean speed, the governor is said to be
Stable
Unstable
Isochronous
Hunt
A torsional system with discs of moment of inertia I₁ and I₂ as shown in the below figure, is gear driven such that the ratio of speed of shaft B to shaft A is 'G'. Neglecting the inertia of gears, the equivalent inertia of disc on shaft B at the speed of shaft A is equal to 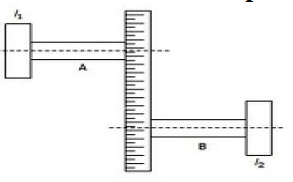
G.I₂
G².I₂
I₂/G
I₂/G²
Which of the following statement is correct?
The primary unbalanced force is less than the secondary unbalanced force.
The primary unbalanced force is maximum twice in one revolution of the crank.
The unbalanced force due to reciprocating masses varies in magnitude and direction both.
The magnitude of swaying couple in locomotives is inversely proportional to the distance between the two cylinder centre lines
If the opposite links of a four bar linkage are equal, the links will always form a
Triangle
Rectangle
Parallelogram
Pentagon
The brake commonly used in railway trains is
Shoe brake
Band brake
Band and block brake
Internal expanding brake
In a cone pulley, if the sum of radii of the pulleys on the driving and driven shafts is Constant, then
Open belt drive is recommended
Crossed belt drive is recommended
Both open belt drive and crossed belt drive is recommended
The drive is recommended depending upon the torque transmitted
The lower pairs are __________ pairs.
Self-closed
Force-closed
Friction closed
None of these
Which of the following statement is correct?
For constant velocity ratio transmission between two gears, the common normal at the point of contact must always pass through a fixed point on the line joining the centres of rotation of gears.
For involute gears, the pressure angle changes with the change in centre distance between gears.
The epicyclic gear trains involve rotation of atleast one gear axis about some other gear axis.
All of the above
In a multiple V-belt drive, when a single belt is damaged, it is preferable to change the complete set to
Reduce vibration
Reduce slip
Ensure uniform loading
Ensure proper alignment
The natural frequency of free torsional vibrations of a shaft is equal to (where q = Torsional stiffness of the shaft, and I = Mass moment of inertia of the disc attached at the end of a shaft)
2π. √(q/I)
2π qI
(1/2π). √(q/I)
1/2π
Which of the following mechanism is an approximate straight line motion mechanism?
Watt's mechanism
Grasshopper mechanism
Robert's mechanism
All of these
Two pulleys of radii r₁ and r₂ and at distance x apart are connected by means of a cross belt drive. The length of the belt is
π (r₁ + r₂) + [(r₁ + r₂)²/x] + 2x
π (r₁ + r₂) + [(r₁ - r₂)²/x] + 2x
π (r₁ - r₂) + [(r₁ - r₂)²/x] + 2x
π (r₁ - r₂) + [(r₁ + r₂)²/x] + 2x
The velocity of a flat-faced follower when it has contact with the flank of a circular arc cam, is given by
ωR cosθ
ω(R - r₁) cosθ
ω(R - r₁) sinθ
ωr₁ sinθ
The ratio of the driving tensions for V-belts is __________ times that of flat belts. (Where β = Semi-angle of the groove)
sinβ
cosβ
cosecβ
secβ