
When the particles of a body moves perpendicular to its axis, then the body is said to have
Longitudinal vibration
Transverse vibration
Torsional vibration
None of these
Correct Answer :
B. Transverse vibration
Related Questions
Balancing of rotating and reciprocating parts of an engine is necessary when it runs at
Slow speed
Moderate speed
Highs peed
Any one of these
The gears are termed as medium velocity gears, if their peripheral velocity is
1-3 m/s
3-15 m/s
15-30 m/s
30-50 m/s
If some links are connected such that motion between them can take place in more than one direction, it is called
Incompletely constrained motion
Partially constrained motion
Completely constrained motion
Successfully constrained motion
The sense of coriolis component 2 ωv is same as that of the relative velocity vector v rotated at
45° in the direction of rotation of the link containing the path
45° in the direction opposite to the rotation of the link containing the path
90° in the direction of rotation of the link containing the path
180° in the direction opposite to the rotation of the link containing the path
The frictional torque transmitted in a truncated conical pivot bearing, considering uniform wear, is
(1/2). μ W cosec α (r₁ + r₂)
(2/3).μ W cosec α (r₁ + r₂)
(1/2). μ W cosec α [(r₁³ - r₂³)/(r₁² - r₂²)]
(2/3). μ W cosec α [(r₁³ - r₂³)/(r₁² - r₂²)]
The frequency of oscillation at compared to earth will be
6 times more
6 times less
2.44 times more
2.44 times less
The Klein's method of construction for reciprocating engine mechanism
Is a simplified version of instantaneous centre method
Utilises a quadrilateral similar to the diagram of mechanism for reciprocating engine
Enables determination of coriolis component
Is based on the acceleration diagram
The arrangement is called bevel gearing, when two __________ are connected by gears.
Intersecting and coplanar shafts
Nonintersecting and non-coplanar shafts
Parallel and coplanar shafts
Parallel and non-coplanar shafts
An imaginary circle which by pure rolling action, gives the same motion as the actual gear, is called
Addendum circle
Dedendum circle
Pitch circle
Clearance circle
The frictional torque transmitted by a cone clutch is same as that of
Flat pivot bearing
Flat collar bearing
Conical pivot bearing
Truncated conical pivot bearing
Which of the following mechanism is an approximate straight line motion mechanism?
Watt's mechanism
Grasshopper mechanism
Robert's mechanism
All of these
In the two rotor system as shown in the below figure (I₁ < I₂), a node of vibration is situated 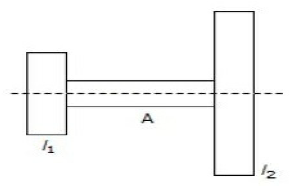
Between I₁, and I₂ but nearer I₁
Between I₁, and I₂ but nearer to I₂
Exactly in the middle of the shaft
Nearer to I₁ but outside
The two parallel and coplanar shafts are connected by gears having teeth parallel to the axis of the shaft. This arrangement is known as
Spur gearing
Helical gearing
Bevel gearing
Spiral gearing
The coriolis component of acceleration is taken into account for
Slider crank mechanism
Four bar chain mechanism
Quick return motion mechanism
All of these
To connect two parallel and coplanar shafts the following type of gearing is used
Spur gear
Bevel gear
Spiral gear
None of the above
In a radial cam, the follower moves
In a direction perpendicular to the cam axis
In a direction parallel to the cam axis
In any direction irrespective of the cam axis
Along the cam axis
The Scott-Russell mechanism consists of
Sliding and turning pairs
Sliding and rotary pairs
Turning and rotary pairs
Sliding pairs only
A reed type tachometer use the principle of
Longitudinal vibration
Torsional vibration
Transverse vibration
Damped free vibration
Rectangular bar in a rectangular hole is the following type of pair
Completely constrained motion
Partially constrained motion
Incompletely constrained motion
Freely constrained motion
If the rotating mass of a rim type flywheel is distributed on another rim type flywheel whose mean radius is half the mean radius of the former, then energy stored in the latter at the same speed will be
Four times the first one
Same as the first one
One fourth of the first one
One and a half times the first one
The frequency of oscillation of a compound pendulum is
2π. √[gh/(kG² + h²)]
2π. √[(kG² + h²)/gh]
(1/2π). √[gh/(kG² + h²)]
(1/2π). √[(kG² + h²)/gh]
In gears, interference takes place when
The tip of a tooth of a mating gear digs into the portion between base and root circles
Gears do not move smoothly in the absence of lubrication
Pitch of the gears is not same
Gear teeth are undercut
The equivalent length of a simple pendulum which gives the same frequency as a compound pendulum is
h/(kG² + h²)
(kG² + h²)/h
h²/(kG² + h²)
(kG² + h²)/h²
In a simple train of wheels, the velocity ratio __________ the intermediate wheels.
Depends upon
Is independent of
Either A or B
None of these
In a drag link quick return mechanism, the shortest link is always fixed. The sum of the shortest and longest link is
Equal to sum of other two
Greater than sum of other two
Less than sum of other two
There is no such relationship
In a Hartnell governor, the stiffness of the spring is given by (where S1 and S2 = Spring forces exerted on the sleeve at max. and min. radii of rotation, and h = Compression of the spring)
(S₁ + S₂)/h
(S₁ - S₂)/h
(S₁ + S₂)/2h
(S₁ - S₂)/2h
The radial distance of a tooth from the pitch circle to the bottom of the tooth is called
Dedendum
Addendum
Clearance
Working depth
The mechanism in which two are turning pairs and two are sliding pairs, is called a
Double slider crank chain
Elliptical trammel
Scotch yoke mechanism
All of these
In order to double the period of a simple pendulum, the length of the string should be
Halved
Doubled
Quadrupled
None of these
Which of the following property of the instantaneous centre is correct?
A rigid link rotates instantaneously relative to another link at the instantaneous centre for the configuration of the mechanism considered.
The two rigid links have no linear velocity relative to each other at the instantaneous centre.
The velocity of the instantaneous centre relative to any third rigid link is same whether the instantaneous centre is regarded as a point on the first rigid link or on the second rigid link.
All of the above