
Which of the following is the example of lever of first order?
Arm of man
Pair of scissors
Pair of clinical tongs
All of the above
Correct Answer :
D. All of the above
Related Questions
Which of the following is not the unit of power?
kW (kilowatt)
hp (horse power)
kcal/sec
kcal/kg sec
Coulomb friction is the friction between
Bodies having relative motion
Two dry surfaces
Two lubricated surfaces
Solids and liquids
A machine having an efficiency greater than 50%, is known as
Reversible machine
Non-reversible machine
Neither reversible nor non-reversible machine
Ideal machine
Tangent of angle of friction is equal to
Kinetic friction
Limiting friction
Angle of repose
Coefficient of friction
If the masses of both the bodies, as shown in the below figure, are doubled, then the acceleration in the string will be 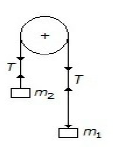
Same
Half
Double
None of these
On the ladder resting on the ground and leaning against a smooth vertical wall, the force of friction will be
Downwards at its upper end
Upwards at its upper end
Perpendicular to the wall at its upper end
Zero at its upper end
When a body of mass moment of inertia I (about a given axis) is rotated about that axis with an angular velocity to, then the kinetic energy of rotation is
Iω
Iω2
0.5 Iω
0.5 Iω2
According to law of triangle of forces
Three forces acting at a point will be in equilibrium
Three forces acting at a point can be represented by a triangle, each side being proportional to force
If three forces acting upon a particle are represented in magnitude and direction by the sides of a triangle, taken in order, they will be in equilibrium
If three forces acting at a point are in equilibrium, each force is proportional to the sine of the angle between the other two
One joule is equal to
0.1 N-m
1 N-m
10 N-m
100 N-m
The moment of inertia of a square of side a about its diagonal is
a2/8
a3/12
a4/12
a4/16
A number of forces acting at a point will be in equilibrium, if
All the forces are equally inclined
Sum of all the forces is zero
Sum of resolved parts in the vertical direction is zero (i.e. ΣV = 0)
None of these
The Cartesian equation of trajectory is (where u = Velocity of projection, α = Angle of projection, and x, y = Co-ordinates of any point on the trajectory after t seconds.)
y = (gx²/2u² cos²α) + x. tanα
y = (gx²/2u² cos²α) - x. tanα
y = x. tanα - (gx²/2u² cos²α)
y = x. tanα + (gx²/2u² cos²α)
The loss of kinetic energy during inelastic impact, is given by (where m1 = Mass of the first body, m2 = Mass of the second body, and u1 and u2 = Velocities of the first and second bodies respectively.)
[m₁ m₂/2(m₁ + m₂)] (u₁ - u₂)²
[2(m₁ + m₂)/m₁ m₂] (u₁ - u₂)²
[m₁ m₂/2(m₁ + m₂)] (u₁² - u₂²)
[2(m₁ + m₂)/m₁ m₂] (u₁² - u₂²)
When a body of mass m attains a velocity v from rest in time t, then the kinetic energy of translation is
mv2
mgv2
0.5 mv2
0.5 mgv2
The moment of the force P about O as shown in the below figure is 
P × OA
P × OB
P × OC
P × AC
The velocity ratio in case of an inclined plane inclined at angle θ to the horizontal and weight being pulled up the inclined plane by vertical effort is
sinθ
cosθ
tanθ
cosecθ
The maximum mechanical advantage of a lifting machine is
1 + m
1 - m
1 / m
m
The acceleration of a body sliding down an inclined surface is
g sinθ
g cosθ
g tanθ
None of these
The total energy possessed by a system of moving bodies
Is constant at every instant
Varies from point to point
Is maximum in the start and minimum at the end
Is minimum in the start and maximum at the end
Which of the following statement is correct in connection with projectiles?
A path, traced by a projectile in the space, is known as trajectory.
The velocity, with which a projectile is projected, is known as the velocity of projection.
The angle, with the horizontal, at which a projectile is projected, is known as angle of projection.
All of the above
According to Lamis theorem
The three forces must be equal
The three forces must be at 120° to each other
The three forces must be in equilibrium
If the three forces acting at a point are in equilibrium, then each force is proportional to the sine of the angle between the other two
The periodic time of one oscillation for a simple pendulum is (where l = Length of the pendulum.)
(1/2π). √(l/g)
(1/2π). √(g/l)
2π. √(l/g)
None of these
The velocity ratio of a differential wheel and axle with D as the diameter of effort wheel and d1 and d2 as the diameters of larger and smaller axles respectively, is
D/(d₁ + d₂)
D/(d₁ - d₂)
2D/(d₁ + d₂)
2D/(d₁ - d₂)
The resolved part of the resultant of two forces inclined at an angle θ in a given direction is equal to
The algebraic sum of the resolved parts of the forces in the given direction
The sum of the resolved parts of the forces in the given direction
The difference of the forces multiplied by the cosine of θ
The sum of the forces multiplied by the sine of θ
For any system of coplanar forces, the condition of equilibrium is that the
Algebraic sum of the horizontal components of all the forces should be zero
Algebraic sum of the vertical components of all the forces should be zero
Algebraic sum of moments of all the forces about any point should be zero
All of the above
The velocity of a particle (v) moving with simple harmonic motion, at any instant is given by (where r = Amplitude of motion, and y = Displacement of the particle from mean position.)
ω.√(y² - r²)
ω.√(r² - y²)
ω².√(y² - r²)
ω².√(r² - y²)
In actual machines
Mechanical advantage is greater than velocity ratio
Mechanical advantage is equal to velocity ratio
Mechanical advantage is less than velocity ratio
Mechanical advantage is unity
Which of the following do not have identical dimensions?
Momentum and impulse
Torque and energy
Torque and work
Moment of a force and angular momentum.
The slope on the road surface generally provided on the curves is known as
Angle of friction
Angle of repose
Angle of banking
None of these
The resultant of the two forces P and Q is R. If Q is doubled, the new resultant is perpendicular to P. Then
P = Q
Q = R
Q = 2R
None of these