
An ideal machine is one whose efficiency is
Between 60 and 70 %
Between 70 and 80 %
Between 80 and 90 %
100 %
Correct Answer :
D. 100 %
Related Questions
The ratio of limiting friction and normal reaction is known as
Coefficient of friction
Angle of friction
Angle of repose
Sliding friction
If u1 and u2 are the velocities of two moving bodies in the same direction before impact and v1 and v2 are their velocities after impact, then coefficient of restitution is given by
(v1 - v2)/(u1 - u2)
(v₂ - v₁)/(u1 - u2)
(u1 - u2)/(v1 - v2)
(u₂ + u₁)/(v₂ + v₁)
In order to double the period of simple pendulum, the length of the string should be
Halved
Doubled
Quadrupled
None of these
If a suspended body is struck at the centre of percussion, then the pressure on die axis passing through the point of suspension will be
Maximum
Minimum
Zero
Infinity
Which is the correct statement about law of polygon of forces?
If any number of forces acting at a point can be represented by the sides of a polygon taken in order, then the forces are in equilibrium
If any number of forces acting at a point can be represented in direction and magnitude by the sides of a polygon, then the forces are in equilibrium
If a polygon representing forces acting at a point is closed then forces are in equilibrium
If any number of forces acting at a point can be represented in direction and magnitude by the sides of a polygon taken in order, then the forces are in equilibrium
Which of the following is not the unit of energy?
kg m
kcal
Watt
Watt hours
According to parallel axis theorem, the moment of inertia of a section about an axis parallel to the axis through centre of gravity (i.e. IP) is given by(where, A = Area of the section, IG = Moment of inertia of the section about an axis passing through its C.G., and h = Distance between C.G. and the parallel axis.)
IP = IG + Ah2
IP = IG - Ah2
IP = IG / Ah2
IP = Ah2 / IG
The centre of gravity of a semi-circle lies at a distance of __________ from its base measured along the vertical radius.
3r/ 8
4r/ 3π
8r/3
3r/4π
Which of the following is the example of lever of first order?
Arm of man
Pair of scissors
Pair of clinical tongs
All of the above
A smooth cylinder lying on its convex surface remains in __________ equilibrium.
Stable
Unstable
Neutral
None of these
The acceleration of a body sliding down an inclined surface is
g sinθ
g cosθ
g tanθ
None of these
One kg force is equal to
7.8 N
8.9 N
9.8 N
12 N
Varingon's theorem of moments states that if a number of coplanar forces acting on a particle are in equilibrium, then
Their algebraic sum is zero
Their lines of action are at equal distances
The algebraic sum of their moments about any point in their plane is zero
The algebraic sum of their moments about any point is equal to the moment of their resultant force about the same point.
A framed structure is imperfect, if the numbers of members are __________ (2j - 3).
Equal to
Less than
Greater than
Either (B) or (C)
The velocity of a particle moving with simple harmonic motion is __________ at the mean position.
Zero
Minimum
Maximum
None of these
If three forces acting in different planes can be represented by a triangle, these will be in
Non-equilibrium
Partial equilibrium
Full equilibrium
Unpredictable
The centre of percussion of a solid cylinder of radius r resting on a horizontal plane will be
r/2
2r/3
r/A
3r/2
The forces which meet at one point, but their lines of action __________ on the same plane, are Known as non-coplanar concurrent forces.
Lie
Do not lie
Either A or B
None of these
The moment of a force
Is the turning effect produced by a force, on the body, on which it acts
Is equal to the product of force acting on the body and the perpendicular distance of a point and the line of action of the force
Is equal to twice the area of the triangle, whose base is the line representing the force and whose vertex is the point, about which the moment is taken
All of the above
Two bodies of masses m1 and m2 are hung from the ends of a rope, passing over a frictionless pulley as shown in the figure below. The acceleration of the string will be 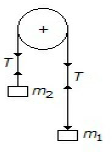
g (m1 - m2)/(m1 + m2)
2g (m1 - m2)/(m1 + m2)
g (m1 + m2)/(m1 - m2)
2g (m1 + m2)/(m1 - m2)
A body of mass m moving with a constant velocity v strikes another body of same mass moving with same velocity but in opposite direction. The common velocity of both the bodies after collision is
v
2v
4v
8v
The law of the machine is (where P = Effort applied to lift the load, m = A constant which is equal to the slope of the line, W = Load lifted, and C = Another constant which represents the machine friction.)
P = mW - C
P = m/W + C
P = mW + C
P = C - mW
A couple produces
Translatory motion
Rotational motion
Combined translatory and rotational motion
None of the above
From a circular plate of diameter 6 cm is cut out a circle whose diameter is a radius of the plate. Find the e.g. of the remainder from the centre of circular plate
0.5 cm
1.0 cm
1.5 cm
2.5 cm
The mechanical advantage of a lifting machine is the ratio of
Distance moved by effort to the distance moved by load
Load lifted to the effort applied
Output to the input
All of the above
The minimum force required to slide a body of weight W on a rough horizontal plane is
W sinθ
W cosθ
W tanθ
None of these
Center of percussion is
The point of C.G.
The point of metacenter
The point of application of the resultant of all the forces tending to cause a body to rotate about a certain axis
Point of suspension
Tangent of angle of friction is equal to
Kinetic friction
Limiting friction
Angle of repose
Coefficient of friction
Centre of gravity of a thin hollow cone lies on the axis at a height of
One-fourth of the total height above base
One-third of the total height above base
One-half of the total height above base
Three-eighth of the total height above the base
The maximum efficiency of a lifting machine is
1/m
V.R./m
m/V.R.
1/(m × V.R.)