
A body in motion will be subjected to coriolis acceleration when that body is
In plane rotation with variable velocity
In plane translation with variable velocity
In plane motion which is a resultant of plane translation and rotation
Restrained to rotate while sliding over another body
Correct Answer :
D. Restrained to rotate while sliding over another body
Related Questions
Pulley in a belt drive acts as
Cylindrical pair
Turning pair
Rolling pair
Sliding pair
In a rigid link OA, velocity of A w.r.t. O will be
Parallel to OA
Perpendicular to OA
At 45° to OA
Along AO
A motor car moving at a certain speed takes a left turn in a curved path. If the engine rotates in the same direction as that of wheels, men due to centrifugal forc
The reaction on me inner wheels increases and on the outer wheels decreases
The reaction on the outer wheels increases and on the inner wheels decreases
The reaction on the front wheels increases and on the rear wheels decreases
The reaction on the rear wheels increases and on the front wheels decreases
A disturbing mass m₁ attached to the rotating shaft may be balanced by a single mass m₂ attached in the same plane of rotation as that of m₁, such that (where r₁ and r₂ are the radii of rotation of m₁ and m₂ respectively)
m₁r₂ = m₂r₁
m₁r₁ = m₂r₂
m₁m₂ = r₁r₂
None of these
The frictional torque transmitted in a flat collar bearing, considering uniform wear, is (where r₁ and r₂ = External and internal radii of collar respectively)
(1/2) μ W (r₁ + r₂)
(2/3) μ W (r₁ + r₂)
(1/2) μ W [(r₁³ - r₂³)/(r₁² - r₂²)]
(2/3) μ W [(r₁³ - r₂³)/(r₁² - r₂²)]
Which of the following would constitute a link?
Piston, piston rod and cross head
Piston and piston rod
Piston rod and cross head
Piston, crank pin and crank shaft
Scotch yoke mechanism is used to generate
Sine functions
Square roots
Logarithms
Inversions
When brakes are applied to all the four wheels of a moving car, the distance travelled by the car before it is brought to rest, will be
Maximum
Minimum
Zero
None of these
Which of the following is a lower pair?
Ball and socket i
Piston and cylinder
Cam and follower
Both (A) and (B) above
The two parallel and coplanar shafts are connected by gears having teeth parallel to the axis of the shaft. This arrangement is known as
Spur gearing
Helical gearing
Bevel gearing
Spiral gearing
The driving and driven shafts connected by a Hooke's joint will have equal speeds, if
cosθ = sinα
sinθ = ± tanα
tanθ = ± cosα
cotθ = cosα
The stress induced in a body will be shear stress, when it is subjected to
Longitudinal vibrations
Transverse vibrations
Torsional vibrations
None of these
For the brake to be self locking, the force P at C shown in the below figure, should 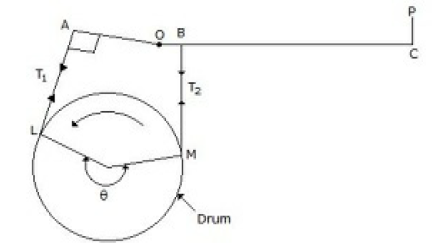
Be zero
Act in upward direction
Act in downward direction
None of these
The Klein's diagram is used when
Crank has uniform angular velocity
Crank has nonuniform angular velocity
Crank has uniform angular acceleration
Crank has nonuniform angular acceleration
Which of the following statement is correct for gears?
The addendum is less than the dedendum
The pitch circle diameter is the product of module and number of teeth
The contact ratio means the number of pairs of teeth in contact
All of the above
In a Hartnell governor, the stiffness of the spring is given by (where S1 and S2 = Spring forces exerted on the sleeve at max. and min. radii of rotation, and h = Compression of the spring)
(S₁ + S₂)/h
(S₁ - S₂)/h
(S₁ + S₂)/2h
(S₁ - S₂)/2h
The acceleration of a particle moving with simple harmonic motion, at any instant is given by
ωx
ω²x
ω²/x
ω³/x
A point on a connecting link (excluding end points) of a double slider crank mechanism traces a
Straight line path
Hyperbolic path
Parabolic path
Elliptical path
A pulley and belt in a belt drive form a
Cylindrical pair
Turning pair
Rolling pair
Sliding pair
The static friction
Bears a constant ratio to the normal reaction between the two surfaces
Is independent of the area of contact, between the two surfaces
Always acts in a direction, opposite to that in which the body tends to move
All of the above
If ω/ωn is very low for a body vibrating under steady state vibrations, the phase angle for all values of damping factors, will tend to approach
0°
90°
180°
360°
In the below figure, PC is the connecting rod and OC is the crank making an angle θ with the line of stroke PO and rotates with uniform angular velocity at ω rad/s. The Klien's acceleration diagram for determining the acceleration of the piston P is shown by quadrilateral CQNO. The acceleration of the piston P with respect to the crankpin C is given by 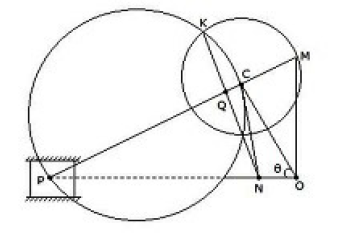
ω² × NO
ω² × CO
ω² × CN
ω² × QN
The cam follower generally used in aircraft engines is
Knife edge follower
Flat faced follower
Spherical faced follower
Roller follower
The Ackermann steering mechanism is preferred to the Davis type in automobiles because
The former is mathematically accurate
The former is having turning pair
The former is most economical
The former is most rigid
The Ackerman steering gear mechanism is preferred to the Davis steering gear mechanism, because
Whole of the mechanism in the Ackerman steering gear is on the back of the front wheels
The Ackerman steering gear consists of turning pairs
The Ackerman steering gear is most economical
Both (A) and (B)
In a system subjected to damped forced vibrations, the ratio of maximum displacement to the static deflection is known as
Critical damping ratio
Damping factor
Logarithmic decrement
Magnification factor
Whirling speed of the shaft is the speed at which
Shaft tends to vibrate in longitudinal direction
Torsional vibrations occur
Shaft tends to vibrate vigorously in transverse direction
Combination of transverse and longitudinal vibration occurs
The dedendum circle diameter is equal to (where, φ = Pressure angle)
Pitch circle dia. × cosφ
Addendum circle dia. × cosφ
Clearance circle dia. × cosφ
Pitch circle dia. × sinφ
When the two elements of a pair have a surface contact when relative motion takes place and the surface of one element slides over the surface of the other, the pair formed is known as a
Lower pair
Higher pair
Self-closed pair
Force-closed pair
Torsional vibrations are said to occur when the particles of a body moves
Perpendicular to its axis
Parallel to its axis
In a circle about its axis
None of these