
Coriolis component is encountered in
Quick return mechanism of shaper
Four bar chain mechanism
Slider crank mechanism
Both (A) and (C) above
Correct Answer :
A. Quick return mechanism of shaper
Related Questions
Which of the following has sliding motion?
Crank
Connecting rod
Crank pin
Crosshead
A mass of 1 kg is attached to the end of a spring with a stiffness of 0.7 N/mm. The critical damping coefficient of this system is
1.4 N-s/m
18.52 N-s/m
52.92 N-s/m
529.2 N-s/m
The fundamental equation for correct steering is (where φ and α = Angle through which the axis of the outer wheel and inner wheel turns respectively, c = Distance between the pivots of the front axles, and d = Wheel base)
sinφ + sinα = b/c
cosφ - sinα = c/b
cotφ - cotα = c/b
tanφ + cotα = b/c
The effort of a Porter governor is equal to (where c = Percentage increase in speed, m = Mass of ball, and M = Mass on the sleeve)
c (m - M) g
c (m + M) g
c/(m + M) g
c/(m - M) g
The number of centers in a crank driven slider crank mechanism is
0
2
4
6
The critical speed of a shaft depends upon its
Mass
Stiffness
Mass and stiffness
Stiffness and eccentricity
If ω/ωn = 2, where co is the frequency of excitation and ωn is the natural frequency of vibrations, then the transmissibility of vibration will the
0.5
1
1.5
2
A disturbing mass m₁ attached to the rotating shaft may be balanced by a single mass m₂ attached in the same plane of rotation as that of m₁, such that (where r₁ and r₂ are the radii of rotation of m₁ and m₂ respectively)
m₁r₂ = m₂r₁
m₁r₁ = m₂r₂
m₁m₂ = r₁r₂
None of these
The velocity of any point in mechanism relative to any other point on the mechanism on velocity polygon is represented by the line
Joining the corresponding points
Perpendicular to line as per (A)
Not possible to determine with these data
At 45° to line as per (A)
Rectilinear motion of piston is converted into rotary by
Cross head
Slider crank
Connecting rod
Gudgeon pin
The cam follower generally used in automobile engines is
Knife edge follower
Flat faced follower
Spherical faced follower
Roller follower
The danger of breakage and vibration is maximum
Below the critical speed
Near the critical speed
Above the critical speed
None of these
The frequency of oscillation of a torsional pendulum is
2πk/r. √(g/l)
r/2πk. √(l/g)
2πr/k. √(g/l)
r/2πk. √(g/l)
In a Hartnell governor, the compression of the spring is __________ the lift of the sleeve.
Equal to
Less than
Greater than
None of these
In vibration isolation system, if ω/ωn < 2, then for all values of damping factor, the transmissibility will be (where ω = Angular speed of the system, ωn = Natural frequency of vibration of the system)
Less than unity
Equal to unity
Greater than unity
Zero
The magnitude of velocities of the points on a rigid link is
Directly proportional to the distance from the points to the instantaneous centre and is parallel to the line joining the point to the instantaneous centre
Directly proportional to the distance from the points to the instantaneous centre and is perpendicular to the line joining the point to the instantaneous centre
Inversely proportional to the distance from the points to the instantaneous centre and is parallel to the line joining the point to the instantaneous centre
Inversely proportional to the distance from the points to the instantaneous centre and is perpendicular to the line joining the point to the instantaneous centre
Cam size depends upon
Base circle
Pitch circle
Prime circle
Outer circle
The direction of linear velocity of any point on a link with respect to another point on the same link is
Parallel to the link joining the points
Perpendicular to the link joining the points
At 45° to the link joining the points
None of the above
The coriolis component of acceleration depends upon
Velocity of slider
Angular velocity of the link
Both (A) and (B)
None of these
The power transmitted by a belt is maximum when the maximum tension in the belt is _________ of centrifugal tension.
One-third
Two-third
Double
Three times
A rotor supported at A and B carries two masses as shown in the below figure. The rotor is 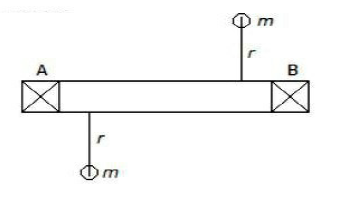
Dynamically balanced
Statically balanced
Statically and dynamically balanced
Not balanced
Consider the following mechanisms:
1. Oscillating cylinder engine mechanism
2. Toggle mechanism
3. Radial cylinder engine mechanism
4. Quick return mechanism Which of the above are inversions of slider crank mechanism?
1, 2 and 4
2, 3 and 4
1, 2 and 3
1, 3 and 4
Cylindrical cams can be classified as
Circular
Tangent
Reciprocating
None of the above
The minimum number of teeth on the pinion which will mesh with any gear without interference for 20° full depth involute teeth will be
12
14
18
24
Higher pairs are those which have
Point or line contact between the two elements when in motion
Surface contact between the two elements when in motion
Elements of pairs not held together mechanically
Two elements that permit relative motion
When the radius of rotation of balls __________ as the equilibrium speed increases, the governor is said to be unstable.
Remains constant
Decreases
Increases
None of these
In railway axle boxes, the bearing used is
Deep groove ball bearing
Double row self aligning ball bearing
Double row spherical roller bearing
Cylindrical roller bearing
The method of direct and reverse cranks is used in engines for
The control of speed fluctuations
Balancing of forces and couples
Kinematic analysis
Vibration analysis
A body is said to be under forced vibrations, when
There is a reduction in amplitude after every cycle of vibration
No external force acts on a body, after giving it an initial displacement
A body vibrates under the influence of external force
None of the above
The motion between a pair which takes place in __________ is known as incompletely constrained motion.
One direction only
Two directions only
More than one direction
None of these