
The magnitude of velocities of the points on a rigid link is
Directly proportional to the distance from the points to the instantaneous centre and is parallel to the line joining the point to the instantaneous centre
Directly proportional to the distance from the points to the instantaneous centre and is perpendicular to the line joining the point to the instantaneous centre
Inversely proportional to the distance from the points to the instantaneous centre and is parallel to the line joining the point to the instantaneous centre
Inversely proportional to the distance from the points to the instantaneous centre and is perpendicular to the line joining the point to the instantaneous centre
Correct Answer :
D. Inversely proportional to the distance from the points to the instantaneous centre and is perpendicular to the line joining the point to the instantaneous centre
Related Questions
The Ackerman steering gear mechanism is preferred to the Davis steering gear mechanism, because
Whole of the mechanism in the Ackerman steering gear is on the back of the front wheels
The Ackerman steering gear consists of turning pairs
The Ackerman steering gear is most economical
Both (A) and (B)
In the two rotor system as shown in the below figure (I₁ < I₂), a node of vibration is situated 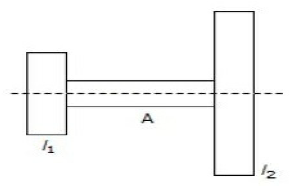
Between I₁, and I₂ but nearer I₁
Between I₁, and I₂ but nearer to I₂
Exactly in the middle of the shaft
Nearer to I₁ but outside
A cam mechanism imparts following motion
Rotating
Oscillating
Reciprocating
All of the above
An exact straight line motion mechanism is a
Scott-Russell's mechanism
Hart's mechanism
Peaucellier's mechanism
All of these
A rigid body, under the action of external forces, can be replaced by two masses placed at a fixed distance apart. The two masses form an equivalent dynamical system, if
The sum of the two masses is equal to the total mass of body
The centre of gravity of the two masses coincides with that of the body
The sum of mass moment of inertia of the masses about their centre of gravity is equal to the mass moment of inertia of the body
All of the above
The two links OA and OB are connected by a pin joint at O. If the link OA turns with angular velocity ω₁ rad/s in the clockwise direction and the link OB turns with angular velocity ω₂ rad/s in the clockwise direction, then the rubbing velocity at the pin joint O is (where r = Radius of the pin at O)
ω₁.ω₂.r
(ω₁ - ω₂)r
(ω₁ + ω₂)r
(ω₁ - ω₂)2r
The mechanism in which two are turning pairs and two are sliding pairs, is called a
Double slider crank chain
Elliptical trammel
Scotch yoke mechanism
All of these
The balancing weights are introduced in planes parallel to the plane of rotation of the disturbing mass. To obtain complete dynamic balance, the minimum number of balancing weights to be introduced in different planes is
1
2
3
4
When a point at the end of a link moves with constant angular velocity, its acceleration will have
Radial component only
Tangential component only
Coriolis component only
Radial and tangential components both
If the radius of gyration of a compound pendulum about an axis through e.g. is more, then its frequency of oscillation will be
Less
More
Same
Data are insufficient to determine same
For dynamic balancing of a shaft
The net dynamic force acting on the shaft is equal to zero
The net couple due to the dynamic forces acting on the shaft is equal to zero
Both (A) and (B)
None of the above
Longitudinal vibrations are said to occur when the particles of a body moves
Perpendicular to its axis
Parallel to its axis
In a circle about its axis
None of these
A system in dynamic balance implies that
The system is critically damped
There is no critical speed in the system
The system is also statically balanced
There will absolutely no wear of bearings
When a shaking force is transmitted through the springs, damping becomes detrimental when the ratio of its frequency to the natural frequency is greater than
0.25
0.5
1
2
The two elements of a pair are said to form a _________ when they permit relative motion between them.
Open pair
Kinematic pair
Sliding pair
None of these
The swaying couple is due to the
Primary unbalanced force
Secondary unbalanced force
Two cylinders of locomotive
Partial balancing
Which gear is used for connecting two coplanar and intersecting shafts?
Spur gear
Helical gear
Bevel gear
None of the above
The number of centers in a crank driven slider crank mechanism is
0
2
4
6
Which of the following statement is wrong?
A round bar in a round hole form a turning pair
A square bar in a square hole form a sliding pair
A vertical shaft in a foot step bearing forms a successful constraint
All of the above
The frictional torque transmitted in a flat collar bearing, considering uniform pressure, is (where r₁ and r₂ = External and internal radii of collar respectively)
(1/2). μ W (r₁ + r₂)
(2/3). μ W (r₁ + r₂)
(1/2). μ W [(r₁³ - r₂³)/(r₁² - r₂²)]
(2/3). μ W [(r₁³ - r₂³)/(r₁² - r₂²)]
The acceleration of the reciprocating roller follower when it has contact with the straight flanks of the tangent cam, is given by
ω². (r₁ r₂). (1 - cos² θ)
ω². (r₁ + r₂). (1 + cos² θ)
ω². (r₁ + r₂). [(2 - cos² θ)/cos³ θ]
ω². (r₁ - r₂). (1 - sin² θ)
Ball and a Socket forms a
Turning pair
Rolling pair
Screw pair
Spherical pair
The secondary unbalanced force is __________ the primary unbalanced force.
One-half
Two-third
n times
1/n times
The tendency of a body to resist change from rest or motion is known as
Mass
Friction
Inertia
Resisting force
Angle of action of cam is defined as the angle
Of rotation of the cam for a definite displacement of the follower
Through which the cam rotates during the period in which the follower remains in the highest position
Moved by the cam from the instant the follower begins to rise, till it reaches its highest position
Moved by the cam from beginning of ascent to the termination of descent
The amplitude of vibration is always __________ the radius of the circle.
Equal to
Less than
Greater than
None of these
In automobiles the power is transmitted from gear box to differential through
Bevel gear
Universal joint
Hooke's joint
Knuckle joint
The sense of Coriolis component is such that it
Leads the sliding velocity vector by 90°
Lags the sliding velocity vector by 90°
Is along the sliding velocity vector
Leads the sliding velocity vector by 180°
The velocity of a particle moving with simple harmonic motion, at any instant is given by (where ω = Displacement of the particle from mean position)
ω √(x² - r²)
ω √(r² - x²)
ω² √(x² - r²)
ω² √(r² - x²)
In a Hartnell governor, the stiffness of the spring is given by (where S1 and S2 = Spring forces exerted on the sleeve at max. and min. radii of rotation, and h = Compression of the spring)
(S₁ + S₂)/h
(S₁ - S₂)/h
(S₁ + S₂)/2h
(S₁ - S₂)/2h