
Which of the following is not a vector quantity?
Weight
Velocity
Acceleration
Force
Correct Answer :
A. Weight
Related Questions
When the spring of a watch is wound, it will possess
Strain energy
Kinetic energy
Heat energy
Electrical energy
Coefficient of friction is the
Angle between normal reaction and the resultant of normal reaction and the limiting friction
Ratio of limiting friction and normal reaction
The friction force acting when the body is just about to move
The friction force acting when the body is in motion
The maximum height of a projectile on a horizontal plane, is
u² sin²α/2g
u² cos²α/2g
u² sin²α/g
u² cos²α/g
If the gravitational acceleration at any place is doubled, then the weight of a body will be
g/2
g
√2.g
2g
In actual machines
Mechanical advantage is greater than velocity ratio
Mechanical advantage is equal to velocity ratio
Mechanical advantage is less than velocity ratio
Mechanical advantage is unity
A block of mass m1, placed on an inclined smooth plane is connected by a light string passing over a smooth pulley to mass m2, which moves vertically downwards as shown in the below figure. The tension in the string is 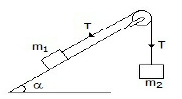
m1/m2
m1. g. sin α
m1.m2/m1 + m2
m1. m2.g (1 + sin α)/(m1 + m2)
Moment of inertia of a circular section about an axis perpendicular to the section is
πd3/16
πd3/32
πd4/32
πd4/64
When a body falls freely under gravitational force, it possesses __________ weight.
No
Minimum
Maximum
None of these
The maximum velocity of a particle moving with simple harmonic motion is
ω
ωr
ω2r
ω/r
The forces, which meet at one point, but their lines of action do not lie in a plane, are called
Coplanar non-concurrent forces
Non-coplanar concurrent forces
Non-coplanar non-concurrent forces
Intersecting forces
The time of flight of a projectile on downward inclined plane depends upon
Angle of projection
Angle of inclination of the plane
Both (A) and (B)
None of these
The resultant of two forces P and Q acting at an angle θ is
√(P² + Q² + 2PQ sinθ)
√(P² + Q² + 2PQ cosθ)
√(P² + Q² - 2PQ cosθ)
√(P² + Q² - 2PQ tanθ)
The range of projectile (R) on an upward inclined plane is
g. cos² β/2u². sin (α + β). cos α
2u². sin (α + β). cos α/g. cos² β
g. cos² β/2u². sin (α - β). cos α
2u². sin (α - β). cos α/g. cos² β
In a single threaded worm and worm wheel, the number of teeth on the worm is 50. The diameter of the effort wheel is 100 mm and that of load drum is 50 mm. The velocity ratio is
50
100
200
400
In order to double the period of simple pendulum, the length of the string should be
Halved
Doubled
Quadrupled
None of these
Lami's theorem states that
Three forces acting at a point will be in equilibrium
Three forces acting at a point can be represented by a triangle, each side being proportional to force
If three forces acting upon a particle are represented in magnitude and direction by the sides of a triangle, taken in order, they will be in equilibrium
If three forces acting at a point are in equilibrium, each force is proportional to the sine of the angle between the other two
The overturning of a vehicle on a level circular path can be avoided if the velocity of vehicle is __________ √(gra/h)
Less than
Greater than
Equal to
None of these
The friction experienced by a body, when in motion, is known as
Rolling friction
Dynamic friction
Limiting friction
Static friction
A single force and a couple acting in the same plane upon a rigid body
Balance each other
Cannot balance each other
Produce moment of a couple
Are equivalent
The acceleration of a particle moving with simple harmonic motion is __________ at the mean position.
Zero
Minimum
Maximum
None of these
The periodic time of a particle with simple harmonic motion is __________ proportional to the angular velocity.
Directly
Inversely
Square root
None of these
The resultant of the following three couples 20 kg force, 0.5 m arm, +ve sense 30 kg force, 1 m arm, -ve sense 40 kg force, 0.25 m arm, +ve sense having arm of 0.5 m will be
20 kg, -ve sense
20 kg, + ve sense
10 kg, + ve sense
10 kg, -ve sense
A framed structure is perfect if it contains members equal to
2n³
2n
n²
3n² Where n = number of joints in a frame
A pair of smith's tongs is an example of the lever of
Zeroth order
First order
Second order
Third order
The unit of angular velocity is
m/min
rad/s
Revolutions/min
Both (B) and (C)
Center of percussion is
The point of C.G.
The point of metacenter
The point of application of the resultant of all the forces tending to cause a body to rotate about a certain axis
Point of suspension
Which of the following is not the unit of pressure?
kg/cm
Bar
Atmosphere
Newton
The skidding away of the vehicle on a level circular path can be avoided if the force of friction between the wheels and the ground is __________ the centrifugal force.
Less than
Greater than
Equal to
None of these
A force while acting on a body may
Change its motion
Balance the forces, already acting on it
Give rise to the internal stresses in it
All of these
The point, through which the whole weight of the body acts, irrespective of its position, is known as
Moment of inertia
Centre of gravity
Centre of percussion
Centre of mass