
In a Hartnell governor, the lift of the sleeve is given by (where r₁ and r₂ = Max. and min. radii of rotation, x = Length of ball arm of the lever, and y = Length of sleeve arm of the lever)
(r₁ + r₂) (y/x)
(r₁ + r₂) (x/y)
(r₁ - r₂) (y/x)
(r₁ - r₂) (x/y)
Correct Answer :
C. (r₁ - r₂) (y/x)
Related Questions
When the nature of contact between the elements of a pair is such that it can only slide relative to the other, the pair is known as a
Screw pair
Spherical pair
Turning pair
Sliding pair
The equivalent length of a simple pendulum which gives the same frequency as a compound pendulum is
h/(kG² + h²)
(kG² + h²)/h
h²/(kG² + h²)
(kG² + h²)/h²
The Klein's method of construction for reciprocating engine mechanism
Is based on acceleration diagram
Is a simplified form of instantaneous center method
Utilises a quadrilateral similar to the diagram of mechanism for reciprocating engine
Enables determination of Carioles component
The following is the inversion of slider crank chain mechanism
Whitworth quick return mechanism
Hand pump
Oscillating cylinder engine
All of the above
The danger of breakage and vibration is maximum
Below the critical speed
Near the critical speed
Above the critical speed
None of these
The frictional torque transmitted in a conical pivot bearing, considering uniform pressure, is (where R = Radius of shaft, and α = Semi-angle of the cone)
(1/2) μ W R cosecα
(2/3) μ W R cosecα
(3/4) μ W R cosecα
μ W R cosecα
The frictional torque transmitted by a cone clutch is same as that of
Flat pivot bearing
Flat collar bearing
Conical pivot bearing
Truncated conical pivot bearing
Oldham's coupling is the
Second inversion of double slider crank chain
Third inversion of double slider crank chain
Second inversion of single slider crank chain
Third inversion of slider crank chain
A spring controlled governor is found unstable. It can be made stable by
Increasing the spring stiffness
Decreasing the spring stiffness
Increasing the ball mass
Decreasing the ball mass
A rigid body possesses ________degrees of freedom
One
Two
Four
Six
Governor is used in automobile to
Decrease the variation of speed
Maximize the fuel economy
Limit the vehicle speed
Maintain constant engine speed
The partial balancing of reciprocating parts in locomotives produces
Hammer blow
Swaying couple
Variation in tractive force along the line of stroke
All of the above
Instantaneous center of rotation of a link in a four bar mechanism lies on
Right side pivot of this link
Left side pivot of this link
A point obtained by intersection on extending adjoining links
Cant occur
The length of a simple pendulum which gives the same frequency as the compound pendulum, is
kG + l₁
kG² + l₁
(kG² + l₁²)/ l₁
(kG + l₁²)/ l₁
When a ship travels in a sea, which of the effect is more dangerous
Steering
Pitching
Rolling
All of the above
The secondary unbalanced force is maximum when the angle of inclination of the crank with the line of stroke is
0° and 90°
180° and 360°
Both (A) and (B)
None of these
Power of a governor is the
Mean force exerted at the sleeve for a given percentage change of speed
Workdone at the sleeve for maximum equilibrium speed
Mean force exerted at the sleeve for maximum equilibrium speed
None of the above
A rigid body, under the action of external forces, can be replaced by two masses placed at a fixed distance apart. The two masses form an equivalent dynamical system, if
The sum of the two masses is equal to the total mass of body
The centre of gravity of the two masses coincides with that of the body
The sum of mass moment of inertia of the masses about their centre of gravity is equal to the mass moment of inertia of the body
All of the above
In a Hartnell governor, if a spring of greater stiffness is used, then the governor will be
Less sensitive
More sensitive
Unaffected of sensitivity
Isochronous
The acceleration of a particle at any instant has two components i.e. radial component and tangential component. These two components will be
Parallel to each other
Perpendicular to each other
Inclined at 45°
Opposite to each other
A combination of kinematic pairs, joined in such a way that the relative motion between the links is completely constrained, is called a
Structure
Mechanism
Kinematic chain
Inversion
The factional torque for square thread at the mean radius r while raising load W is given by
T = W.r tan(φ - α)
T = W.r tan(φ + α)
T = W.r tanα
T = W.r tanφ
The Ackerman steering gear mechanism is preferred to the Davis steering gear mechanism, because
Whole of the mechanism in the Ackerman steering gear is on the back of the front wheels
The Ackerman steering gear consists of turning pairs
The Ackerman steering gear is most economical
Both (A) and (B)
In a radial cam, the follower moves
In a direction perpendicular to the cam axis
In a direction parallel to the cam axis
In any direction irrespective of the cam axis
Along the cam axis
A universal joint is an example of
Higher pair
Lower pair
Rolling pair
Sliding pair
A reed type tachometer use the principle of
Longitudinal vibration
Torsional vibration
Transverse vibration
Damped free vibration
A rotor supported at A and B carries two masses as shown in the below figure. The rotor is 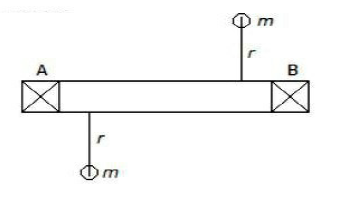
Dynamically balanced
Statically balanced
Statically and dynamically balanced
Not balanced
In a ball bearing, ball and bearing forms a
Turning pair
Rolling pair
Screw pair
Spherical pair
In an open pair, the two elements of a pair
Have a surface contact when in motion
Have a line or point contact when in motion
Are kept in contact by the action of external forces, when in motion
Are not held together mechanically
Two systems shall be dynamically equivalent when
The mass of two are same
C.G. of two coincides
M.I. of two about an axis through e.g. is equal
All of the above