
The Whitworth quick return motion mechanism is formed in a slider crank chain when the
Coupler link is fixed
Longest link is a fixed link
Slider is a fixed link
Smallest link is a fixed link
Correct Answer :
A. Coupler link is fixed
Related Questions
The centre distance between two meshing involute gears is equal to
Sum of base circle radii/cosφ
Difference of base circle radii/ cosφ
Sum of pitch circle radii/ cosφ
Difference of pitch circle radii/ cosφ
According to Kennedy's theorem, if three bodies move relatively to each other, their instantaneous centres will lie on a
Straight line
Parabolic curve
Triangle
Rectangle
In a multiple V-belt drive, when a single belt is damaged, it is preferable to change the complete set to
Reduce vibration
Reduce slip
Ensure uniform loading
Ensure proper alignment
In a simple train of wheels, the velocity ratio __________ the intermediate wheels.
Depends upon
Is independent of
Either A or B
None of these
The Klein's diagram is used when
Crank has uniform angular velocity
Crank has nonuniform angular velocity
Crank has uniform angular acceleration
Crank has nonuniform angular acceleration
In under damped vibrating system, if x₁ and x₂ are the successive values of the amplitude on the same side of the mean position, then the logarithmic decrement is equal to
x₁/x₂
log(x₁/x₂)
loge(x₁/x₂)
log(x₁.x₂)
Two systems shall be dynamically equivalent when
The mass of two are same
C.G. of two coincides
M.I. of two about an axis through e.g. is equal
All of the above
When there is a reduction in amplitude over every cycle of vibration, then the body is said to have
Free vibration
Forced vibration
Damped vibration
Under damped vibration
The example of higher pair is
Belt, rope and chain drives
Gears, cams
Ball and roller bearings
All of the above
The acceleration of a particle at any instant has two components i.e. radial component and tangential component. These two components will be
Parallel to each other
Perpendicular to each other
Inclined at 45°
Opposite to each other
Which of the following disciplines provides study of relative motion between the parts of a machine?
Theory of machines
Applied mechanics
Mechanisms
Kinematics
The sensitiveness of the governor __________ as the speed range decreases.
Remains unaffected
Decreases
Increases
None of these
The relation between number of pairs (p) forming a kinematic chain and the number of links (l) is
l = 2p - 2
l = 2p - 3
l = 2p - 4
l = 2p - 5
Module of a gear is
D/T
T/D
2D/T
2T/D
The Klein's method of construction for reciprocating engine mechanism
Is a simplified version of instantaneous centre method
Utilises a quadrilateral similar to the diagram of mechanism for reciprocating engine
Enables determination of coriolis component
Is based on the acceleration diagram
The secondary unbalanced force due to inertia of reciprocating parts in a reciprocating engine is given by (where m = Mass of reciprocating parts, ω = Angular speed of crank, r = Radius of crank, θ = Angle of inclination of crank with the line of stroke, and n = Ratio of the length of connecting rod to radius of crank)
m.ω².r sinθ
m.ω².r cosθ
m.ω².r (sin 2θ/n)
m.ω².r (cos 2θ/n)
A mechanism consisting of four links is called a __________ mechanism.
Simple
Compound
Binary
None of these
In a kinematic chain, a quaternary joint is equivalent to
One binary joint
Two binary joints
Three binary joints
Four binary joints
The contact ratio is the ratio of
Length of pair of contact to the circular pitch
Length of arc of contact to the circular pitch
Length of arc of approach to the circular pitch
Length of arc of recess to the circular pitch
When a shaking force is transmitted through the springs, damping becomes detrimental when the ratio of its frequency to the natural frequency is greater than
0.25
0.5
1
2
In a differential band brake as shown in the below figure, the drum rotates anticlockwise and the greater tension T₁ acts at A and smaller tension T₂ at B. Length OA is greater than length OB. In order to apply the brake, the force P at C should 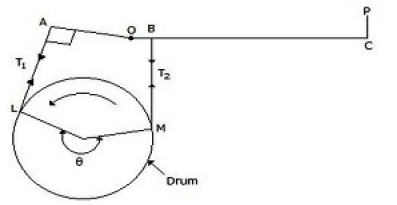
Be zero
Act in upward direction
Act in downward direction
None of the above
In a rigid link OA, velocity of A w.r.t. O will be
Parallel to OA
Perpendicular to OA
At 45° to OA
Along AO
When a point moves along a straight line, its acceleration will have
Radial component only
Tangential component only
Coriolis component only
Radial and tangential components both
Kinematic pairs are those which have
Two elements held together mechanically
Two elements having relative motion
Two elements having Coriolis component
Minimum of two instantaneous centres
Balancing of rotating and reciprocating parts of an engine is necessary when it runs at
Slow speed
Moderate speed
Highs peed
Any one of these
Angle of descent of cam is defined as the angle
During which the follower returns to its initial position
Of rotation of the cam for a definite displacement of the follower
Through which the cam rotates during the period in which the follower remains in the highest position
Moved by the cam from the instant the follower begins to rise, till it reaches its highest position
Which of the following mechanism is an approximate straight line motion mechanism?
Watt's mechanism
Grasshopper mechanism
Robert's mechanism
All of these
A Hartnell governor is a
Dead weight governor
Pendulum type governor
Spring loaded governor
Inertia governor
When the two elements of a pair have a surface contact when relative motion takes place and the surface of one element slides over the surface of the other, the pair formed is known as a
Lower pair
Higher pair
Self-closed pair
Force-closed pair
The dedendum circle diameter is equal to (where, φ = Pressure angle)
Pitch circle dia. × cosφ
Addendum circle dia. × cosφ
Clearance circle dia. × cosφ
Pitch circle dia. × sinφ