
Which of the following disciplines provides study of relative motion between the parts of a machine?
Theory of machines
Applied mechanics
Mechanisms
Kinematics
Correct Answer :
D. Kinematics
Related Questions
The power of a Porter governor is equal to
[c²/(1 + 2c)] (m + M) g.h
[2c²/(1 + 2c)] (m + M) g.h
[3c²/(1 + 2c)] (m + M) g.h
[4c²/(1 + 2c)] (m + M) g.h
In a circular arc cam with roller follower, the acceleration in any position of the lift will depend only upon
Total lift, total angle of lift, minimum radius of cam and cam speed
Radius of circular arc, cam speed, location of centre of circular arc and roller diameter
Mass of cam follower linkage, spring stiffness and cam speed
Total lift, centre of gravity of the cam and cam speed
In gears, interference takes place when
The tip of a tooth of a mating gear digs into the portion between base and root circles
Gears do not move smoothly in the absence of lubrication
Pitch of the gears is not same
Gear teeth are undercut
The factor which affects the critical speed of a shaft is
Diameter of disc
Span of shaft
Eccentricity
All of these
The lead screw of a lathe with nut forms a
Rolling pair
Sliding pair
Screw pair
Turning pair
The size of cam depends upon
Base circle
Pitch circle
Prime circle
Pitch curve
Module of a gear is
D/T
T/D
2D/T
2T/D
In a differential band brake as shown in the below figure, if the length OB is greater than OA, then the force P at C should act in the downward direction. 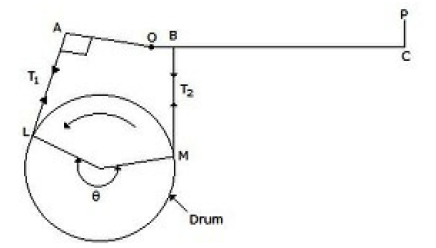
Yes
No
Unpredictable
None of these
In which of the following type of gear train the first gear and the last gear are co-axial.
Simple gear train
Compound gear train
Reverted gear train
None of the above
In a turning moment diagram, the variations of energy above and below the mean resisting torque line is called
Fluctuation of energy
Maximum fluctuation of energy
Coefficient of fluctuation of energy
None of these
A motor car moving at a certain speed takes a left turn in a curved path. If the engine rotates in the same direction as that of wheels, men due to centrifugal forc
The reaction on me inner wheels increases and on the outer wheels decreases
The reaction on the outer wheels increases and on the inner wheels decreases
The reaction on the front wheels increases and on the rear wheels decreases
The reaction on the rear wheels increases and on the front wheels decreases
The frictional torque transmitted in a flat pivot bearing with assumption of uniform pressure is _________ as compared to uniform wear.
Less
More
Same
None of these
A spring controlled governor is found unstable. It can be made stable by
Increasing the spring stiffness
Decreasing the spring stiffness
Increasing the ball mass
Decreasing the ball mass
Sense of tangential acceleration of a link
Is same as that of velocity
Is opposite to that of velocity
Could be either same or opposite to velocity
Is perpendicular to that of velocity
The power from the engine to the rear axle of an automobile is transmitted by means of
Worm and worm wheel
Spur gears
Bevel gears
Hooke's joint
The direction of Coriolis component of acceleration is the direction
Of relative velocity vector for the two coincident points rotated by 90° in the direction of the angular velocity of the rotation of the link
Along the centripetal acceleration
Along tangential acceleration
Along perpendicular to angular velocity
A watt's governor can work satisfactorily at speeds from
60 to 80 r.p.m.
80 to 100 r.p.m.
100 to 200 r.p.m.
200 to 300 r.p.m.
The secondary unbalanced force due to inertia of reciprocating parts in a reciprocating engine is given by (where m = Mass of reciprocating parts, ω = Angular speed of crank, r = Radius of crank, θ = Angle of inclination of crank with the line of stroke, and n = Ratio of the length of connecting rod to radius of crank)
m.ω².r sinθ
m.ω².r cosθ
m.ω².r (sin 2θ/n)
m.ω².r (cos 2θ/n)
In order to give the primary balance of the reciprocating parts of a multi-cylinder inline engines,
The algebraic sum of the primary forces must be equal to zero
The algebraic sum of the couples about any point in the plane of the primary forces must be equal to zero
Both (A) and (B)
None of these
In order to double the period of a simple pendulum, the length of the string should be
Halved
Doubled
Quadrupled
None of these
The maximum or minimum value of the swaying couple is
± c.m.ω².r
± a (1 - c) m.ω².r
± (a/√2) (1 - c) m.ω².r
± 2a (1 - c) m.ω².r
An exact straight line motion mechanism is a
Scott-Russell's mechanism
Hart's mechanism
Peaucellier's mechanism
All of these
Peaucelliers mechanism has
Eight links
Six links
Four links
Twelve links
When a point at the end of a link moves with constant angular velocity, its acceleration will have
Radial component only
Tangential component only
Coriolis component only
Radial and tangential components both
The maximum efficiency of spiral gears is (where θ = Shaft angle, and φ = Friction angle)
sin (θ + φ) + 1/ cos (θ - φ) + 1
cos (θ - φ) + 1/ sin (θ + φ) + 1
cos (θ + φ) + 1/ cos (θ - φ) + 1
cos (θ - φ) + 1/ cos (θ + φ) + 1
The relation between number of links (l) and number of joints (j) in a kinematic chain is
l = (1/2).(j + 2)
l = (2/3).(j + 2)
l = (3/4).(j + 3)
l = j + 4
In a single slider crank chain
Each of the four pairs is a turning pair
One is a turning pair and three are sliding pairs
Two are turning pairs and two are sliding pairs
Three are turning pairs and one is a sliding pair
The rotor of a ship rotates in clockwise direction when viewed from stern and the ship takes a left turn. The effect of gyroscopic couple acting on it will be
To raise the bow and stern
To lower the bow and stern
To raise the bow and lower the stern
To raise the stern and lower the bow
A pulley and belt in a belt drive form a
Cylindrical pair
Turning pair
Rolling pair
Sliding pair
According to Kennedy's theorem, if three bodies have plane motions, their instantaneous centers lie on
A triangle
A point
Two lines
A straight line