
Cross head and guides form a
Lower pair
Higher pair
Turning pair
Sliding pair
Correct Answer :
D. Sliding pair
Related Questions
Which of the following is an inversion of a double slider crank chain?
Oldham's coupling
Elliptical trammel
Scotch yoke mechanism
All of these
In a disc clutch, if there are n₁ number of discs on the driving shaft and n₂ number of discs on the driven shaft, then the number of pairs of contact surfaces will be
n₁ + n₂
n₁ + n₂ + 1
n₁ + n₂ - 1
n₁ + n₂ - 2
Sensitiveness of the governor is defined as the ratio of the
Mean speed to the maximum equilibrium speed
Mean speed to the minimum equilibrium speed
Difference of the maximum and minimum equilibrium speeds to the mean speed
Sum of the maximum and minimum equilibrium speeds to the mean speed
The sense of Coriolis component is such that it
Leads the sliding velocity vector by 90°
Lags the sliding velocity vector by 90°
Is along the sliding velocity vector
Leads the sliding velocity vector by 180°
Hammer blow
Is the maximum horizontal unbalanced force caused by the mass provided to balance the reciprocating masses.
Is the maximum vertical unbalanced force caused by the mass added to balance the reciprocating masses
Varies as the square root of the speed
Varies inversely with the square of the speed
The coriolis component of acceleration exists whenever a point moves along a path that has
Linear displacement
Rotational motion
Gravitational acceleration
Tangential acceleration
The frictional torque transmitted in a conical pivot bearing, considering uniform pressure, is (where R = Radius of shaft, and α = Semi-angle of the cone)
(1/2) μ W R cosecα
(2/3) μ W R cosecα
(3/4) μ W R cosecα
μ W R cosecα
The static friction
Bears a constant ratio to the normal reaction between the two surfaces
Is independent of the area of contact, between the two surfaces
Always acts in a direction, opposite to that in which the body tends to move
All of the above
When the primary direct crank of a reciprocating engine makes an angle of θ with the line of stroke, then the secondary direct crank will make an angle of _________ with the line of stroke.
θ/2
θ
2θ
4θ
A shaft has two heavy rotors mounted on it. The transverse natural frequencies, considering each of the rotor separately, are 100 Hz and 200 Hz respectively. The lowest critical speed is
5,367 r.p.m.
6,000 r.p.m.
9,360 r.p.m.
12,000 r.p.m.
When a body is subjected to transverse vibrations, the stress induced in a body will be
Shear stress
Bending stress
Tensile stress
Compressive stress
In a mechanism, usually one link is fixed. If the fixed link is changed in a kinematic chain, then relative motion of other links
Will remain same
Will change
Could change or remain unaltered depending on which link is fixed
Will not occur
A higher pair has__________.
Point contact
Surface contact
No contact
None of the above
To connect two parallel and coplanar shafts the following type of gearing is used
Spur gear
Bevel gear
Spiral gear
None of the above
The example of higher pair is
Belt, rope and chain drives
Gears, cams
Ball and roller bearings
All of the above
A spring controlled governor is said to be stable if the controlling force line when produced intersects the Y-axis
At the origin
Below the origin
Above the origin
Any one of these
The maximum fluctuation of speed is the
Difference of minimum fluctuation of speed and the mean speed
Difference of the maximum and minimum speeds
Sum of maximum and minimum speeds
Variations of speed above and below the mean resisting torque line
The secondary unbalanced force is maximum when the angle of inclination of the crank with the line of stroke is
0° and 90°
180° and 360°
Both (A) and (B)
None of these
The locus of a point on a thread unwound from a cylinder will be
A straight line
A circle
Involute
Cycloidal
A typewriter mechanism has 7 numbers of binary joints, six links and none of higher pairs. The mechanism is
Kinematically sound
Not sound
Soundness would depend upon which link is kept fixed
Data is not sufficient to determine same
The lower pairs are __________ pairs.
Self-closed
Force-closed
Friction closed
None of these
In steady state forced vibrations, the amplitude of vibrations at resonance is __________ damping coefficient.
Equal to
Directly proportional to
Inversely proportional to
Independent of
The balancing weights are introduced in planes parallel to the plane of rotation of the disturbing mass. To obtain complete dynamic balance, the minimum number of balancing weights to be introduced in different planes is
1
2
3
4
The unbalanced force due to reciprocating masses
Varies in magnitude but constant in direction
Varies in direction but constant in magnitude
Varies in magnitude and direction both
Constant in magnitude and direction both
V-belts are usually used for
Long drives
Short drives
Long and short drives
None of these
In order to facilitate starting of locomotive in any position, the cranks of a locomotive with two cylinders, are placed at
45° to each other
90° to each other
120° to each other
180° to each other
Scotch yoke mechanism is used to generate
Sine functions
Square roots
Logarithms
Inversions
A completely constrained motion can be transmitted with.
1 link with pin joints
2 links with pin joints
3 links with pin joints
4 links with pin joints
In the below figure, PC is the connecting rod and OC is the crank making an angle θ with the line of stroke PO and rotates with uniform angular velocity at ω rad/s. The Klien's acceleration diagram for determining the acceleration of the piston P is shown by quadrilateral CQNO, the acceleration of the piston is _________ when the crank OC and connecting rod PC are at right angles to each other. 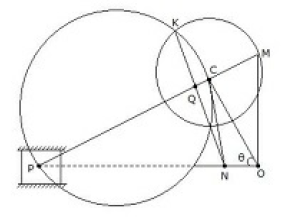
Infinity
Zero
Any +ve value
Any -ve value
The steering of a ship means
Movement of a complete ship up and down in vertical plane about transverse axis
Turning of a complete ship in a curve towards right or left, while it moves forward
Rolling of a complete ship sideways
None of the above