
The type of pair formed by two elements which are so connected that one is constrained to turn or revolve about a fixed axis of another element is known as
Turning pair
Rolling pair
Sliding pair
Spherical pair
Correct Answer :
A. Turning pair
Related Questions
A mechanism __________ for transmitting or transforming motion.
Can be used
Cannot be used
Unpredictable
None of these
When two links are connected by a pin joint, their instantaneous centre lies
On their point of contact
At the centre of curvature
At the centre of circle
At the pin joint
In the two rotor system as shown in the below figure (I₁ < I₂), a node of vibration is situated 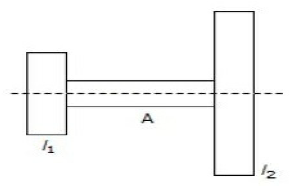
Between I₁, and I₂ but nearer I₁
Between I₁, and I₂ but nearer to I₂
Exactly in the middle of the shaft
Nearer to I₁ but outside
In under damped vibrating system, the amplitude of vibration
Decreases linearly with time
Increases linearly with time
Decreases exponentially with time
Increases exponentially with time
For the brake to be self locking, the force P at C shown in the below figure, should 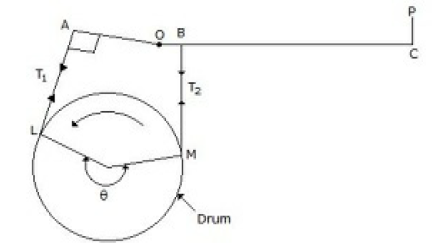
Be zero
Act in upward direction
Act in downward direction
None of these
The two elements of a pair are said to form a higher pair, when they
Have a surface contact when in motion
Have a line or point contact when in motion
Are kept in contact by the action of external forces, when in motion
Permit relative motion
The frictional torque transmitted by a cone clutch is same as that of
Flat pivot bearing
Flat collar bearing
Conical pivot bearing
Truncated conical pivot bearing
The instantaneous centres which vary with the configuration of mechanism are called
Permanent instantaneous centres
Fixed instantaneous centres
Neither fixed nor permanent instantaneous centres
None of the above
Length of arc of contact is given by
Arc of approach - Arc of recess
Arc of approach + Arc of recess
Arc of approach / Arc of recess
Arc of approach × Arc of recess
In Meyer's expansion valve, the main valve is driven by an eccentric having an angle of advance from
10°-15°
15°-25°
25°-30°
30°-40°
The motion between a pair which takes place in __________ is known as incompletely constrained motion.
One direction only
Two directions only
More than one direction
None of these
The frequency of oscillation of a torsional pendulum is
2πk/r. √(g/l)
r/2πk. √(l/g)
2πr/k. √(g/l)
r/2πk. √(g/l)
Scotch yoke mechanism is used to generate
Sine functions
Square roots
Logarithms
Inversions
In a multiple V-belt drive, when a single belt is damaged, it is preferable to change the complete set to
Reduce vibration
Reduce slip
Ensure uniform loading
Ensure proper alignment
Bifilar suspension method is used to find the
Angular acceleration of the body
Moment of inertia of the body
Periodic time of the body
Frequency of vibration of the body
The arrangement is called bevel gearing, when two __________ are connected by gears.
Intersecting and coplanar shafts
Nonintersecting and non-coplanar shafts
Parallel and coplanar shafts
Parallel and non-coplanar shafts
For the same lift and same angle of ascent, a smaller base circle will give
A small value of pressure angle
A large value of pressure angle
There is no such relation with pressure angle
Something else
The gears are termed as medium velocity gears, if their peripheral velocity is
1-3 m/s
3-15 m/s
15-30 m/s
30-50 m/s
The velocity of a particle moving with simple harmonic motion, at any instant is given by (where ω = Displacement of the particle from mean position)
ω √(x² - r²)
ω √(r² - x²)
ω² √(x² - r²)
ω² √(r² - x²)
When a ship travels in a sea, which of the effect is more dangerous
Steering
Pitching
Rolling
All of the above
Idler pulley is used
For changing the direction of motion of the belt
For applying tension
For increasing velocity ratio
All of the above
The direction of linear velocity of any point on a link with respect to another point on the same link is
Parallel to the link joining the points
Perpendicular to the link joining the points
At 45° to the link joining the points
None of the above
A mechanism is an assemblage of
Two links
Three links
Four or more than four links
All of these
In a steam engine, the distance by which the outer edge of the Dslide valve overlaps the steam port is called
Lead
Steam lap
Exhaust lap
None of these
A circular bar moving in a round hole is an example of
Incompletely constrained motion
Partially constrained motion
Completely constrained motion
Successfully constrained motion
For two governors A and B, the lift of sleeve of governor A is more than that of governor B, for a given fractional change in speed. It indicates that
Governor A is more sensitive than governor B
Governor B is more sensitive than governor A
Both governors A and B are equally sensitive
None of the above
The component of the acceleration, perpendicular to the velocity of the particle, at the given instant is called
Radial component
Tangential component
Coriolis component
None of these
Two pulleys of radii r₁ and r₂ and at distance x apart are connected by means of a cross belt drive. The length of the belt is
π (r₁ + r₂) + [(r₁ + r₂)²/x] + 2x
π (r₁ + r₂) + [(r₁ - r₂)²/x] + 2x
π (r₁ - r₂) + [(r₁ - r₂)²/x] + 2x
π (r₁ - r₂) + [(r₁ + r₂)²/x] + 2x
The natural frequency of free transverse vibrations due to uniformly distributed load acting over a simply supported shaft is (where δS = Static deflection of simply supported shaft due to uniformly distributed load)
0.4985/ √δS
0.5615/ √δS
0.571/ √δS
0.6253/ √δS
Any point on a link connecting double slider crank chain will trace a
Straight line
Circle
Ellipse
Parabola