
Length of arc of contact is given by
Arc of approach - Arc of recess
Arc of approach + Arc of recess
Arc of approach / Arc of recess
Arc of approach × Arc of recess
Correct Answer :
B. Arc of approach + Arc of recess
Related Questions
The velocity of the rubbing surface __________ with the distance from the axis of the bearing.
Increases
Decreases
Remain same
None of these
The flank of the tooth is the surface of the tooth __________ the pitch surface.
Above
Below
At
None of these
When brakes are applied to all the four wheels of a moving car, the distance travelled by the car before it is brought to rest, will be
Maximum
Minimum
Zero
None of these
When two links are connected by a pin joint, their instantaneous centre lies
On their point of contact
At the centre of curvature
At the centre of circle
At the pin joint
Open pairs are those which have
Point or line contact between the two elements when in motion
Surface contact between the two elements when in motion
Elements of pairs not held together mechanically
Two elements that permit relative motion
The centre of gravity of a coupler link in a four bar mechanism will experience
No acceleration
Only linear acceleration
Only angular acceleration
Both linear and angular acceleration
ABCD is a four bar mechanism in which AB = 310 mm and CD = 450 mm. AB and CD are both perpendicular to the fixed link AD, as shown in the below figure. If the velocity of B at this condition is v. Then the velocity of C is 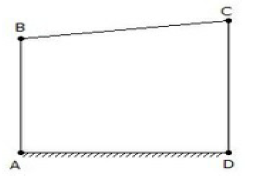
v
(2/3). v
(3/2). v
(9/4). v
In a reciprocating engine, usually __________ of the reciprocating masses are balanced.
One-half
Two-third
Three-fourth
Whole
The velocity of any point in mechanism relative to any other point on the mechanism on velocity polygon is represented by the line
Joining the corresponding points
Perpendicular to line as per (A)
Not possible to determine with these data
At 45° to line as per (A)
The radial distance from the top of a tooth to the bottom of a tooth in a meshing gear, is called
Dedendum
Addendum
Clearance
Working depth
In locomotives, the ratio of the connecting rod length to me crank radius is kept very large in order to
Minimise the effect of primary forces
Minimise the effect of secondary forces
Have perfect balancing
To start the locomotive quickly
In a ball bearing, ball and bearing forms a
Turning pair
Rolling pair
Screw pair
Spherical pair
When a rigid body is suspended vertically and it oscillates with a small amplitude under the action of the force of gravity, the body is known as
Simple pendulum
Compound pendulum
Torsional pendulum
Second's pendulum
The instantaneous centre of a rigid thin disc rolling on a plane rigid surface is located at
The centre of the disc
The point of contact
An infinite distance on the plane surface
The point on the circumference situated vertically opposite to the contact point
In a drag link quick return mechanism, the shortest link is always fixed. The sum of the shortest and longest link is
Equal to sum of other two
Greater than sum of other two
Less than sum of other two
There is no such relationship
The ratio of maximum fluctuation of speed to the mean speed is called
Fluctuation of speed
Maximum fluctuation of speed
Coefficient of fluctuation of speed
None of these
The Kutzbach criterion for determining the number of degrees of freedom (n) is (where l = number of links, j = number of joints and h = number of higher pairs)
n = 3(l - 1) - 2j - h
n = 2(l - 1) -2j - h
n = 3(l - 1) - 3j - h
n = 2(l - 1) - 3j - h
When two pulleys are connected by means of a cross belt drive, then both the pulleys will rotate in __________ directions.
Same
Opposite
Perpendicular
None of these
An involute pinion and gear are in mesh. If both have the same size of addendum, then there will be an interference between the
Tip of the gear tooth and flank of pinion
Tip of the pinion and flank of gear
Flanks of both gear and pinion
Tip of both gear and pinion
A rotor supported at A and B carries two masses as shown in the below figure. The rotor is 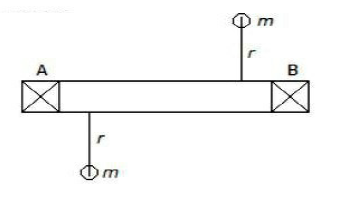
Dynamically balanced
Statically balanced
Statically and dynamically balanced
Not balanced
In a cone pulley, if the sum of radii of the pulleys on the driving and driven shafts is Constant, then
Open belt drive is recommended
Crossed belt drive is recommended
Both open belt drive and crossed belt drive is recommended
The drive is recommended depending upon the torque transmitted
The effort of a Porter governor is equal to (where c = Percentage increase in speed, m = Mass of ball, and M = Mass on the sleeve)
c (m - M) g
c (m + M) g
c/(m + M) g
c/(m - M) g
A typewriter mechanism has 7 numbers of binary joints, six links and none of higher pairs. The mechanism is
Kinematically sound
Not sound
Soundness would depend upon which link is kept fixed
Data is not sufficient to determine same
If the number of links in a mechanism is equal to l, then the numbers of possible inversions are equal to
l - 2
l - 1
l
l + 1
The contact ratio is the ratio of
Length of pair of contact to the circular pitch
Length of arc of contact to the circular pitch
Length of arc of approach to the circular pitch
Length of arc of recess to the circular pitch
The relation l = (2/3).(j + 2) apply only to kinematic chains in which lower pairs are used. This may be used to kinematic chains in which higher pairs are used, but each higher pair may be taken as equivalent to
One lower pair and two additional links
Two lower pairs and one additional link
Two lower pairs and two additional links
Any one of these
The sensitiveness of the governor __________ as the speed range decreases.
Remains unaffected
Decreases
Increases
None of these
One end of a helical spring is fixed while the other end carries the load W which moves with simple harmonic motion. The frequency of motion is given by (where δ = Deflection of the spring)
2π. √(g/δ)
1/2π. √(g/δ)
2π. √(δ/g)
1/2π. √(δ/g)
The ratio of the driving tensions for V-belts is __________ times that of flat belts. (Where β = Semi-angle of the groove)
sinβ
cosβ
cosecβ
secβ
Which of the following is an open pair?
Ball and socket joint
Journal bearing
Lead screw and nut
Cam and follower