
To obviate axial thrust, following gear drive is used
Double helical gears having opposite teeth
Double helical gears having identical teeth
Single helical gear in which one of the teeth of helix angle a is more
Mutter gears
Correct Answer :
A. Double helical gears having opposite teeth
Related Questions
In a simple train of wheels, the velocity ratio __________ the intermediate wheels.
Depends upon
Is independent of
Either A or B
None of these
Whirling speed of the shaft is the speed at which
Shaft tends to vibrate in longitudinal direction
Torsional vibrations occur
Shaft tends to vibrate vigorously in transverse direction
Combination of transverse and longitudinal vibration occurs
The primary unbalanced force is maximum when the angle of inclination of the crank with the line of stroke is
0° and 90°
0° and 180°
90° and 180°
180° and 360°
The Grubler's criterion for determining the degrees of freedom (n) of a mechanism having plane motion is (where l = Number of links, and j = Number of binary joints)
n = (l -1) - j
n = 2(l - 1) - 2j
n = 3(l - 1) - 2j
n = 4(l - 1) - 3j
The angle of inclination of the plane, at which the body begins to move down the plane is called
Angle of friction
Angle of repose
Angle of projection
None of these
The Kutzbach criterion for determining the number of degrees of freedom (n) is (where l = number of links, j = number of joints and h = number of higher pairs)
n = 3(l - 1) - 2j - h
n = 2(l - 1) -2j - h
n = 3(l - 1) - 3j - h
n = 2(l - 1) - 3j - h
In the below figure, PC is the connecting rod and OC is the crank making an angle θ with the line of stroke PO and rotates with uniform angular velocity at ω rad/s. The Klien's acceleration diagram for determining the acceleration of the piston P is shown by quadrilateral CQNO. The acceleration of the piston P with respect to the crankpin C is given by 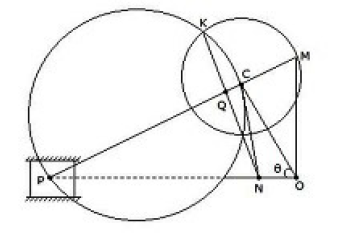
ω² × NO
ω² × CO
ω² × CN
ω² × QN
A shaft carrying two rotors at its ends will have
No node
One node
Two nodes
Three nodes
Which of the following is used to control the speed variations of the engine caused by the fluctuations of the engine turning moment?
D-slide valve
Governor
Flywheel
Meyer's expansion valve
The advantage of the piston valve over the slide valve is that in the former case
Wear is less
Power absorbed is less
Both wear and power absorbed are low
The pressure developed being high provides tight sealing
A motor car moving at a certain speed takes a left turn in a curved path. If the engine rotates in the same direction as that of wheels, men due to centrifugal forc
The reaction on me inner wheels increases and on the outer wheels decreases
The reaction on the outer wheels increases and on the inner wheels decreases
The reaction on the front wheels increases and on the rear wheels decreases
The reaction on the rear wheels increases and on the front wheels decreases
Which of the following is a spring controlled governor?
Hartnell governor
Hartung governor
Wilson-Hartnell governor
All of these
For a kinematic chain to be considered as mechanism
Two links should be fixed
One link should be fixed
None of the links should be fixed
There is no such criterion
The coriolis component of acceleration leads the sliding velocity by
45°
90°
135°
180°
In a band and block brake, the ratio of tensions on tight side and slack side of the band is (where μ = Coefficient of friction between the blocks and the drum, θ = Semi-angle of each block subtending at the centre of drum, and n = Number of blocks)
T₁/T₂ = μ. θ. n
T₁/T₂ = [(1 - μ tanθ)/(1 + μ tanθ)]n
T₁/T₂ = (μ θ)n
T₁/T₂ = [(1 + μ tanθ)/(1 - μ tanθ)]n
A cam mechanism imparts following motion
Rotating
Oscillating
Reciprocating
All of the above
The frictional torque transmitted by a cone clutch is same as that of
Flat pivot bearing
Flat collar bearing
Conical pivot bearing
Truncated conical pivot bearing
The Ackermann steering mechanism is preferred to the Davis type in automobiles because
The former is mathematically accurate
The former is having turning pair
The former is most economical
The former is most rigid
The method of direct and reverse cranks is used in engines for
The control of speed fluctuations
Balancing of forces and couples
Kinematic analysis
Vibration analysis
A kinematic chain requires at least
2 links and 3 turning pairs
3 links and 4 turning pairs
4 links and 4 turning pairs
5 links and 4 turning pairs
The partial balancing of reciprocating parts in locomotives produces
Hammer blow
Swaying couple
Variation in tractive force along the line of stroke
All of the above
Which of the following property of the instantaneous centre is correct?
A rigid link rotates instantaneously relative to another link at the instantaneous centre for the configuration of the mechanism considered.
The two rigid links have no linear velocity relative to each other at the instantaneous centre.
The velocity of the instantaneous centre relative to any third rigid link is same whether the instantaneous centre is regarded as a point on the first rigid link or on the second rigid link.
All of the above
A rotor which is balanced statically but not dynamically is supported on two bearings L apart and at high speed of the rotor, reaction on the left bearing is R. The right side of the bearing is shifted to a new position 2L apart from the left bearing. At the same rotor speed, dynamic reaction on the left bearing in the new arrangement will
Remain same as before
Become equal to 2R
Become equal to R/2
Become equal to R/4
The train value of a gear train is
Equal to velocity ratio of a gear train
Reciprocal of velocity ratio of a gear train
Always greater than unity
Always less than unity
A point B on a rigid link AB moves with respect to A with angular velocity ω rad/s. The total acceleration of B with respect to A will be equal to
Vector sum of radial component and coriolis component
Vector sum of tangential component and coriolis component
Vector sum of radial component and tangential component
Vector difference of radial component and tangential component
The frictional torque transmitted in a conical pivot bearing, considering uniform wear, is
(1/2) μ W R cosec α
(2/3) μ W R cosec α
(3/4) μ W R cosec α
μ W R cosec α
The frequency of oscillation at compared to earth will be
6 times more
6 times less
2.44 times more
2.44 times less
Hart mechanism has
Eight links
Six links
Four links
Twelve links
The engine of an aeroplane rotates in clockwise direction when seen from the tail end and the aeroplane takes a turn to the left. The effect of gyroscopic couple on the aeroplane will be
To dip the nose and tail
To raise the nose and tail
To raise the nose and dip the tail
To dip the nose and raise the tail
A cam with a roller follower would constitute following type of pair
Lower pair
Higher pair
Open pair
Close pair