
For fluctuating loads, well suited bearing is
Ball bearing
Roller bearing
Needle roller bearing
Thrust bearing
Correct Answer :
C. Needle roller bearing
Related Questions
The maximum frictional force, which comes into play, when a body just begins to slide over the surface of the other body, is known as
Static friction
Dynamic friction
Limiting friction
Coefficient of friction
Whitworth quick return mechanism is obtained by inversion of
Slider crank mechanism
Kinematic chain
Five link mechanism
Roller cam mechanism
The Klein's method of construction for reciprocating engine mechanism
Is a simplified version of instantaneous centre method
Utilises a quadrilateral similar to the diagram of mechanism for reciprocating engine
Enables determination of coriolis component
Is based on the acceleration diagram
In a steam engine, the link constitutes a
Piston, piston rod and crosshead
Connecting rod with big and small end brasses, caps and bolts
Crank pin, crankshaft and flywheel
All of the above
The dedendum circle diameter is equal to (where, φ = Pressure angle)
Pitch circle dia. × cosφ
Addendum circle dia. × cosφ
Clearance circle dia. × cosφ
Pitch circle dia. × sinφ
The effort of a Porter governor is equal to (where c = Percentage increase in speed, m = Mass of ball, and M = Mass on the sleeve)
c (m - M) g
c (m + M) g
c/(m + M) g
c/(m - M) g
When a point at the end of a link moves with constant angular velocity, its acceleration will have
Radial component only
Tangential component only
Coriolis component only
Radial and tangential components both
The example of spherical pair is
Bolt and nut
Lead screw of a lathe
Ball and socket joint
Ball bearing and roller bearing
In a screw jack, the effort required to lift the load W is given by (where α = Helix angle, and φ = Angle of friction)
P = W tan(α - φ)
P = W tan(α + φ)
P = W tan(φ - α)
P = W cos(α + φ)
The working depth of a gear is the radial distance from the
Pitch circle to the bottom of a tooth
Pitch circle to the top of a tooth
Top of a tooth to the bottom of a tooth
Addendum circle to the clearance circle
The critical speed of a shaft in revolution per second is __________ as that of natural frequency of transverse vibration.
Same
Different
Unpredictable
None of these
The periodic time is given by (where ω = Angular velocity of the particle in rad/s)
ω/2π
2π/ω
ω × 2π
π/ω
In a ball bearing, ball and bearing forms a
Turning pair
Rolling pair
Screw pair
Spherical pair
If there are L number of links in a mechanism, then number of possible inversions is equal to
L + 1
L - 1
L
L + 2
The frictional torque transmitted in a flat collar bearing, considering uniform pressure, is (where r₁ and r₂ = External and internal radii of collar respectively)
(1/2). μ W (r₁ + r₂)
(2/3). μ W (r₁ + r₂)
(1/2). μ W [(r₁³ - r₂³)/(r₁² - r₂²)]
(2/3). μ W [(r₁³ - r₂³)/(r₁² - r₂²)]
In order to double the period of a simple pendulum, the length of the string should be
Halved
Doubled
Quadrupled
None of these
The primary unbalanced force due to inertia of reciprocating parts in a reciprocating engine is given by (where m = Mass of reciprocating parts, ω = Angular speed of crank, r = Radius of crank, θ = Angle of inclination of crank with the line of stroke, and n = Ratio of the length of connecting rod to radius of crank)
m.ω².r sinθ
m.ω².r cosθ
m.ω².r (sin 2θ/n)
m.ω².r (cos 2θ/n)
For dynamic balancing of a shaft
The net dynamic force acting on the shaft is equal to zero
The net couple due to the dynamic forces acting on the shaft is equal to zero
Both (A) and (B)
None of the above
The static balancing is satisfactory for low speed rotors but with increasing speeds, dynamic balancing becomes necessary. This is because, the
Unbalanced couples are caused only at higher speeds
Unbalanced forces are not dangerous at higher speeds
Effects of unbalances are proportional to the square of the speed
Effects of unbalances are directly proportional to the speed
A Hartnell governor is a
Dead weight governor
Pendulum type governor
Spring loaded governor
Inertia governor
Which of the following disciplines provides study of inertia forces arising from the combined effect of the mass and the motion of the parts?
Theory of machines
Applied mechanics
Mechanisms
Kinetics
An automobile steering gear is an example of
Sliding pair
Rolling pair
Lower pair
Higher pair
In a kinematic chain, a quaternary joint is equivalent to
One binary joint
Two binary joints
Three binary joints
Four binary joints
In a Hartnell governor, if a spring of greater stiffness is used, then the governor will be
Less sensitive
More sensitive
Unaffected of sensitivity
Isochronous
A mechanism is an assemblage of
Two links
Three links
Four or more than four links
All of these
ABCD is a four bar mechanism in which AB = 310 mm and CD = 450 mm. AB and CD are both perpendicular to the fixed link AD, as shown in the below figure. If the velocity of B at this condition is v. Then the velocity of C is 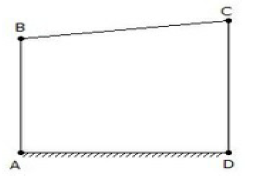
v
(2/3). v
(3/2). v
(9/4). v
According to Kennedy's theorem, if three bodies have plane motions, their instantaneous centers lie on
A triangle
A point
Two lines
A straight line
In steady state forced vibrations, the amplitude of vibrations at resonance is __________ damping coefficient.
Equal to
Directly proportional to
Inversely proportional to
Independent of
Longitudinal vibrations are said to occur when the particles of a body moves
Perpendicular to its axis
Parallel to its axis
In a circle about its axis
None of these
Which of the following statement is correct?
The periodic time of a particle moving with simple harmonic motion is the time taken by a particle for one complete oscillation.
The periodic time of a particle moving with simple harmonic motion is directly proportional to its angular velocity.
The velocity of a particle moving with simple harmonic motion is zero at the mean position.
The acceleration of the particle moving with simple harmonic motion is maximum at the mean position.