
The moment on the pulley which produces rotation is called
Inertia
Momentum
Moment of momentum
Torque
Correct Answer :
D. Torque
Related Questions
Power of a governor is the
Mean force exerted at the sleeve for a given percentage change of speed
Workdone at the sleeve for maximum equilibrium speed
Mean force exerted at the sleeve for maximum equilibrium speed
None of the above
The acceleration of a flat-faced follower when it has contact with the flank of a circular arc cam, is given by
ω² R cosθ
ω² (R - r₁) cosθ
ω² (R - r₁) sinθ
ω² r₁ sinθ
The brake commonly used in railway trains is
Shoe brake
Band brake
Band and block brake
Internal expanding brake
If the rotating mass of a rim type flywheel is distributed on another rim type flywheel whose mean radius is half the mean radius of the former, then energy stored in the latter at the same speed will be
Four times the first one
Same as the first one
One fourth of the first one
One and a half times the first one
The frictional torque transmitted in a conical pivot bearing with assumption of uniform pressure is __________ as compared to uniform wear.
Less
More
Same
None of these
Which of the following mechanism is an approximate straight line motion mechanism?
Watt's mechanism
Grasshopper mechanism
Robert's mechanism
All of these
Which of the following has sliding motion?
Crank
Connecting rod
Crank pin
Crosshead
The Klein's method of construction for reciprocating engine mechanism
Is a simplified version of instantaneous centre method
Utilises a quadrilateral similar to the diagram of mechanism for reciprocating engine
Enables determination of coriolis component
Is based on the acceleration diagram
When the crank is at the inner dead centre, in a reciprocating steam engine, then the acceleration of the piston will be
ω²r. (n + 1)/n
ω²r. (n - 1)/n
ω²r. n/(n + 1)
ω²r. n/(n - 1)
The Ackerman steering gear mechanism is preferred to the Davis steering gear mechanism, because
Whole of the mechanism in the Ackerman steering gear is on the back of the front wheels
The Ackerman steering gear consists of turning pairs
The Ackerman steering gear is most economical
Both (A) and (B)
The contact ratio is given by
(Length of the path of approach)/(Circular pitch)
(Length of path of recess)/(Circular pitch)
(Length of the arc of contact)/(Circular pitch)
(Length of the arc of approach)/cosφ
The lower pair is a
Open pair
Closed pair
Sliding pair
Point contact pair
The train value of a gear train is
Equal to velocity ratio of a gear train
Reciprocal of velocity ratio of a gear train
Always greater than unity
Always less than unity
Higher pairs are those which have
Point or line contact between the two elements when in motion
Surface contact between the two elements when in motion
Elements of pairs not held together mechanically
Two elements that permit relative motion
A rotor supported at A and B carries two masses as shown in the below figure. The rotor is 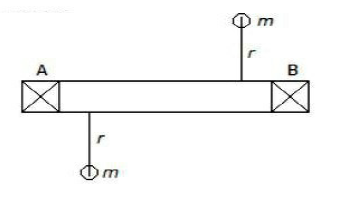
Dynamically balanced
Statically balanced
Statically and dynamically balanced
Not balanced
The effort of a Porter governor is equal to (where c = Percentage increase in speed, m = Mass of ball, and M = Mass on the sleeve)
c (m - M) g
c (m + M) g
c/(m + M) g
c/(m - M) g
The motion of a shaft in a circular hole is an example of
Completely constrained motion
Incompletely constrained motion
Successfully constrained motion
None of these
A rigid body possesses ________degrees of freedom
One
Two
Four
Six
In a locomotive, the resultant unbalanced force due to the two cylinders along the line of stroke, is known as
Tractive force
Swaying couple
Hammer blow
None of these
The stress induced in a body will be shear stress, when it is subjected to
Longitudinal vibrations
Transverse vibrations
Torsional vibrations
None of these
The sense of Coriolis component is such that it
Leads the sliding velocity vector by 90°
Lags the sliding velocity vector by 90°
Is along the sliding velocity vector
Leads the sliding velocity vector by 180°
In steady state forced vibrations, the amplitude of vibrations at resonance is __________ damping coefficient.
Equal to
Directly proportional to
Inversely proportional to
Independent of
In vibration isolation system, if ω/ωn < 2, then for all values of damping factor, the transmissibility will be (where ω = Angular speed of the system, ωn = Natural frequency of vibration of the system)
Less than unity
Equal to unity
Greater than unity
Zero
Kinematic pairs are those which have
Point or line contact between the two elements when in motion
Surface contact between the two elements when in motion
Elements of pairs not held together mechanically
Two elements that permit relative motion
The centrifugal tension in belts
Increases power transmitted
Decreases power transmitted
Have no effect on power transmitted
Increases power transmitted upto a certain speed and then decreases
Two systems shall be dynamically equivalent when
The mass of two are same
C.G. of two coincides
M.I. of two about an axis through e.g. is equal
All of the above
A Hartnell governor has its controlling force (Fc) given by Fc = ar + b, where r is the radius of rotation and a and b are constants. The governor becomes isochronous when
a is +ve and b = 0
a = 0 and b is +ve
a is +ve and b is -ve
a is +ve and b is also +ve
A mechanism __________ for transmitting or transforming motion.
Can be used
Cannot be used
Unpredictable
None of these
If D₁ and D₂ be the diameters of driver and driven pulleys, then belt speed is proportional to
D₁/D₂
D₂/D₁
D₁.D₂
D₁
When the pitching of a ship is upward, the effect of gyroscopic couple acting on it will be
To move the ship towards starboard
To move the ship towards port side
To raise the bow and lower the stern
To raise the stern and lower the bow