
The velocity of a body moving with simple harmonic motion is __________ at the mean position.
Zero
Minimum
Maximum
None of these
Correct Answer :
C. Maximum
Related Questions
Frequency of vibrations is usually expressed in
Number of cycles per hour
Number of cycles per minute
Number of cycles per second
None of these
In a cam drive with uniform velocity follower, the sharp corners of the displacement diagram are rounded off at the beginning and at the end of each stroke. This is done
Because of difficulty in manufacturing cam profile
Because of loose contact of follower with cam surface
In order to have acceleration in beginning and retardation at the end of stroke within the finite limits
Because the uniform velocity motion is a partial parabolic motion
For an isochronous Hartnell governor (where r₁ and r₂ = Maximum and minimum radius of rotation of balls respectively, S₁ and S₂ = Maximum and minimum force exerted on the sleeve respectively, and M = Mass on the sleeve)
(m.g + S₁)/(m.g + S₂) = r₁/r₂
(m.g - S₁)/(m.g - S₂) = r₂/r₁
S₁/S₂ = r₁/r₂
S₂/S₁ = r₁/r₂
The amplitude of vibration is always __________ the radius of the circle.
Equal to
Less than
Greater than
None of these
When a rigid body is suspended vertically and it oscillates with a small amplitude under the action of the force of gravity, the body is known as
Simple pendulum
Compound pendulum
Torsional pendulum
Second's pendulum
ABCD is a four bar mechanism in which AB = 310 mm and CD = 450 mm. AB and CD are both perpendicular to the fixed link AD, as shown in the below figure. If the velocity of B at this condition is v. Then the velocity of C is 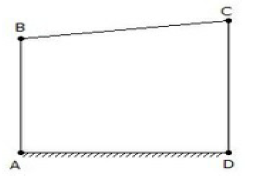
v
(2/3). v
(3/2). v
(9/4). v
A spring controlled governor is said to be isochronous when the controlling force
Increases as the radius of rotation decreases
Increases as the radius of rotation increases
Decreases as the radius of rotation increases
Remain constant for all radii of rotation
The equivalent length of a simple pendulum which gives the same frequency as a compound pendulum is
h/(kG² + h²)
(kG² + h²)/h
h²/(kG² + h²)
(kG² + h²)/h²
When a point moves along a straight line, its acceleration will have
Radial component only
Tangential component only
Coriolis component only
Radial and tangential components both
Critical damping is a function of
Mass and stiffness
Mass and damping coefficient
Mass and natural frequency
Damping coefficient and natural frequency
The example of higher pair is
Belt, rope and chain drives
Gears, cams
Ball and roller bearings
All of the above
In a rigid link OA, velocity of A w.r.t. O will be
Parallel to OA
Perpendicular to OA
At 45° to OA
Along AO
Which of the following is an example of a higher pair?
Toothed gearing
Belt and rope drive
Ball and roller bearing
All of these
A rotor supported at A and B carries two masses as shown in the below figure. The rotor is 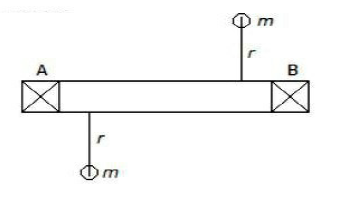
Dynamically balanced
Statically balanced
Statically and dynamically balanced
Not balanced
When a body moves with simple harmonic motion, the product of its periodic time and frequency is equal to
Zero
One
π/2
π
The ratio of maximum fluctuation of energy to the workdone per cycle is called
Fluctuation of energy
Maximum fluctuation of energy
Coefficient of fluctuation of energy
None of these
The frictional torque transmitted in a truncated conical pivot bearing, considering uniform pressure, is
(1/2). μ W cosecα (r₁ + r₂)
(2/3). μ W cosecα (r₁ + r₂)
(1/2). μ W cosecα [(r₁³ - r₂³)/(r₁² - r₂²)]
(2/3). μ W cosecα [(r₁³ - r₂³)/(r₁² - r₂²)]
Which type of gearing is used in steering system of an automobile?
Rack and pinion
Worm and wheel
Spiral gears
None of the above
In a pantograph, all the pairs are
Turning pairs
Sliding pairs
Spherical pairs
Self-closed pairs
The pair is known as a higher pair, when the relative motion between the elements of a pair is
Turning only
Sliding only
Rolling only
Partly turning and partly sliding
A point on a connecting link (excluding end points) of a double slider crank mechanism traces a
Straight line path
Hyperbolic path
Parabolic path
Elliptical path
In a disc clutch, if there are n₁ number of discs on the driving shaft and n₂ number of discs on the driven shaft, then the number of pairs of contact surfaces will be
n₁ + n₂
n₁ + n₂ + 1
n₁ + n₂ - 1
n₁ + n₂ - 2
The unbalanced primary forces in a reciprocating engine are
Balanced completely
Balanced partially
Balanced by secondary forces
Not balanced
The maximum fluctuation of energy is the
Difference between the maximum and minimum energies
Sum of the maximum and minimum energies
Variations of energy above and below the mean resisting torque line
Ratio of the mean resisting torque to the workdone per cycle
Which of the following statement is wrong?
A round bar in a round hole form a turning pair
A square bar in a square hole form a sliding pair
A vertical shaft in a foot step bearing forms a successful constraint
All of the above
The Klein's method of construction for reciprocating engine mechanism
Is a simplified version of instantaneous centre method
Utilises a quadrilateral similar to the diagram of mechanism for reciprocating engine
Enables determination of coriolis component
Is based on the acceleration diagram
The cam and follower is an example of
Sliding pair
Rolling pair
Lower pair
Higher pair
The contact ratio is the ratio of
Length of pair of contact to the circular pitch
Length of arc of contact to the circular pitch
Length of arc of approach to the circular pitch
Length of arc of recess to the circular pitch
If there are L number of links in a mechanism, then number of possible inversions is equal to
L + 1
L - 1
L
L + 2
A mechanism consisting of four links is called a __________ mechanism.
Simple
Compound
Binary
None of these