
When the relation between the controlling force (Fc) and radius of rotation (r) for a spring controlled governor is Fc = ar + b, then the governor will be
Stable
Unstable
Isochronous
None of these
Correct Answer :
B. Unstable
Related Questions
Tangential acceleration direction is
Along the angular velocity
Opposite to angular velocity
May be any one of these
Perpendicular to angular velocity
Angle of action of cam is defined as the angle
Of rotation of the cam for a definite displacement of the follower
Through which the cam rotates during the period in which the follower remains in the highest position
Moved by the cam from the instant the follower begins to rise, till it reaches its highest position
Moved by the cam from beginning of ascent to the termination of descent
A pulley and belt in a belt drive form a
Cylindrical pair
Turning pair
Rolling pair
Sliding pair
A point B on a rigid link AB moves with respect to A with angular velocity ω rad/s. The total acceleration of B with respect to A will be equal to
Vector sum of radial component and coriolis component
Vector sum of tangential component and coriolis component
Vector sum of radial component and tangential component
Vector difference of radial component and tangential component
The Grubler's criterion for determining the degrees of freedom (n) of a mechanism having plane motion is (where l = Number of links, and j = Number of binary joints)
n = (l -1) - j
n = 2(l - 1) - 2j
n = 3(l - 1) - 2j
n = 4(l - 1) - 3j
In a Hartnell governor, the compression of the spring is __________ the lift of the sleeve.
Equal to
Less than
Greater than
None of these
The radial distance from the top of a tooth to the bottom of a tooth in a meshing gear, is called
Dedendum
Addendum
Clearance
Working depth
The type of pair formed by two elements which are so connected that one is constrained to turn or revolve about a fixed axis of another element is known as
Turning pair
Rolling pair
Sliding pair
Spherical pair
A simple spring-mass vibrating system has a natural frequency of fn. If the spring stiffness is halved and the mass is doubled, then the natural frequency will become
fn/2
2 fn
4 fn
8 fn
A spring controlled governor is said to be isochronous when the controlling force
Increases as the radius of rotation decreases
Increases as the radius of rotation increases
Decreases as the radius of rotation increases
Remain constant for all radii of rotation
Bifilar suspension method is used to find the
Angular acceleration of the body
Moment of inertia of the body
Periodic time of the body
Frequency of vibration of the body
The maximum fluctuation of energy is the
Difference between the maximum and minimum energies
Sum of the maximum and minimum energies
Variations of energy above and below the mean resisting torque line
Ratio of the mean resisting torque to the workdone per cycle
The magnitude of velocities of the points on a rigid link is
Directly proportional to the distance from the points to the instantaneous centre and is parallel to the line joining the point to the instantaneous centre
Directly proportional to the distance from the points to the instantaneous centre and is perpendicular to the line joining the point to the instantaneous centre
Inversely proportional to the distance from the points to the instantaneous centre and is parallel to the line joining the point to the instantaneous centre
Inversely proportional to the distance from the points to the instantaneous centre and is perpendicular to the line joining the point to the instantaneous centre
The equation of motion for a vibrating system with viscous damping is (d²x/dt²) + (c/m). (dx/dt) + (s/m). x = 0 If the roots of this equation are real, then the system will be
Over-damped
Under damped
Critically damped
Without vibrations
The velocity of sliding of meshing gear teeth is (Where ω₁ and ω₂ are angular velocities of meshing gears and y is distance between point of contact and the pitch point)
(ω₁ + ω₂)y
(ω₁/ω₂)y
(ω₁ × ω₂)y
(ω₁ + ω₂)/y
The Ackerman steering gear mechanism is preferred to the Davis steering gear mechanism, because
Whole of the mechanism in the Ackerman steering gear is on the back of the front wheels
The Ackerman steering gear consists of turning pairs
The Ackerman steering gear is most economical
Both (A) and (B)
The critical speed of a shaft with a disc supported in between is equal to the natural frequency of the system in
Transverse vibrations
Torsional vibrations
Longitudinal vibrations
All of these
3.The retardation of a flat faced follower when it has contact at the apex of the nose of a circular arc cam, is given by (where OQ = Distance between the centre of circular flank and centre of nose)
ω² × OQ
ω² × OQ sinθ
ω² × OQ cosθ
ω² × OQ tanθ
A spring controlled governor is found unstable. It can be made stable by
Increasing the spring stiffness
Decreasing the spring stiffness
Increasing the ball mass
Decreasing the ball mass
When the two elements of a pair have __________ when in motion, it is said to a lower pair.
Line or point contact
Surface contact
Body contact
None of these
In a disc clutch, if there are n₁ number of discs on the driving shaft and n₂ number of discs on the driven shaft, then the number of pairs of contact surfaces will be
n₁ + n₂
n₁ + n₂ + 1
n₁ + n₂ - 1
n₁ + n₂ - 2
The Klein's method of construction for reciprocating engine mechanism
Is based on acceleration diagram
Is a simplified form of instantaneous center method
Utilises a quadrilateral similar to the diagram of mechanism for reciprocating engine
Enables determination of Carioles component
In under damped vibrating system, the amplitude of vibration
Decreases linearly with time
Increases linearly with time
Decreases exponentially with time
Increases exponentially with time
The relation between the controlling force (Fc) and radius of rotation (r) for a stable spring controlled governor is
Fc = ar + b
Fc = ar - b
Fc = ar
Fc = a/r + b
The centre distance between two meshing involute gears is equal to
Sum of base circle radii/cosφ
Difference of base circle radii/ cosφ
Sum of pitch circle radii/ cosφ
Difference of pitch circle radii/ cosφ
The included angle for the V-belt is usually
10° to 20°
20° to 30°
30° to 40°
60° to 80°
The radius of a friction circle for a shaft rotating inside a bearing is (where r = Radius of shaft, and tan φ = Coefficient of friction between the shaft and bearing)
r sinφ
r cosφ
r tanφ
(r/2) cosφ
The Klein's diagram is used when
Crank has uniform angular velocity
Crank has nonuniform angular velocity
Crank has uniform angular acceleration
Crank has nonuniform angular acceleration
If the rotating mass of a rim type flywheel is distributed on another rim type flywheel whose mean radius is half the mean radius of the former, then energy stored in the latter at the same speed will be
Four times the first one
Same as the first one
One fourth of the first one
One and a half times the first one
In the below figure, PC is the connecting rod and OC is the crank making an angle θ with the line of stroke PO and rotates with uniform angular velocity at ω rad/s. The Klien's acceleration diagram for determining the acceleration of the piston P is shown by quadrilateral CQNO, the acceleration of the piston is _________ when the crank OC and connecting rod PC are at right angles to each other. 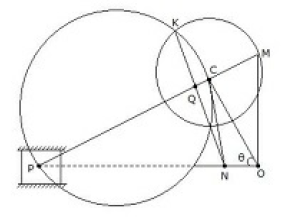
Infinity
Zero
Any +ve value
Any -ve value